Surface area calculation extends the idea of arc length for curves to two-dimensional surfaces in 3D space. By parameterizing a surface with two variables and using the cross product of partial derivatives, you can set up a double integral that computes the exact area of curved, complex shapes. This technique is foundational for flux integrals, divergence theorems, and many applications in physics and engineering.
Surface Parameterization
Representing Surfaces with Parameters
A parametric surface is defined by a vector-valued function that maps a region in the -plane to a surface in 3D space. The two independent parameters and let you describe complex, curved surfaces using a flat coordinate domain.
The partial derivatives and are tangent vectors to the surface at each point. Their cross product produces a normal vector whose magnitude measures how much the parameterization locally stretches or compresses area. This magnitude acts as the scaling factor that converts a small rectangle in parameter space into the corresponding area element on the surface.
A change of variables converts a surface integral into a double integral over . The cross-product magnitude plays the same role here that the Jacobian determinant plays in substitution for multiple integrals: it accounts for the geometric distortion introduced by the parameterization.
Coordinate Systems for Surface Representation
Different coordinate systems simplify parameterization depending on the surface's symmetry.
- Cartesian coordinates : Each point is located by distances along three perpendicular axes. Best for planes, graphs of functions , and surfaces without special symmetry.
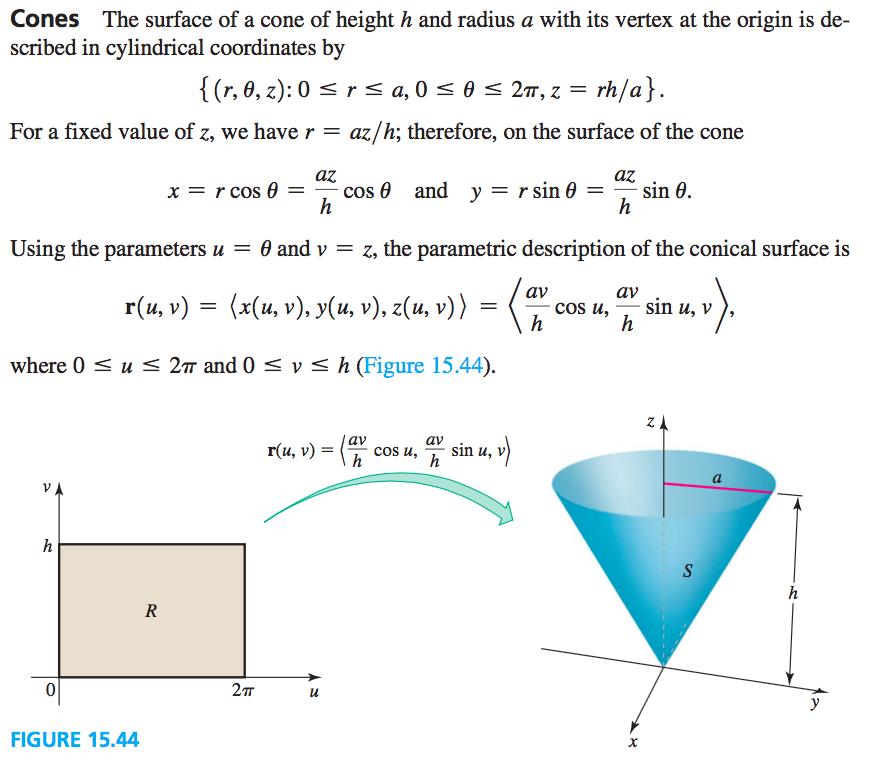
- Cylindrical coordinates : Here is the distance from the -axis, is the angle in the -plane, and is the height. Natural for cylinders, cones, and any surface with circular cross-sections. A typical parameterization sets and (or ).
- Spherical coordinates : is the distance from the origin, is the azimuthal angle, and is the polar angle from the positive -axis. Ideal for spheres, ellipsoids, and surfaces with radial symmetry. For a sphere of radius , you parameterize with and , giving .
Surface Integrals
Calculating Surface Area
The surface area of over a parameter domain is given by:
Here's how to set up and evaluate this integral:
- Write the parameterization and identify the domain with its bounds on and .
- Compute the partial derivatives and .
- Take their cross product . This vector is normal to the surface at each point.
- Find the magnitude . This scalar is the differential area element .
- Integrate over to get the total surface area.
The differential area element (scalar form) is:
The vector surface element retains the direction of the normal:
You use (scalar) for area calculations and scalar surface integrals, and (vector) for flux integrals.
For a graph : The parameterization gives the familiar formula .

Evaluating Surface Integrals
Scalar surface integrals integrate a function over a surface:
You substitute the parameterization into so that everything is expressed in terms of and , then evaluate the resulting double integral over .
Vector surface integrals (flux integrals) measure the flow of a vector field through a surface:
The dot product picks out the component of that passes through the surface (the component along the normal). The sign of the result depends on the orientation you choose for the normal, so be consistent with the direction of the cross product.
Steps for evaluating either type:
- Parameterize the surface and determine .
- Compute (and its magnitude, if needed).
- Substitute into or .
- Set up the double integral over and evaluate.
Vector Calculus Fundamentals
Vector Products and Their Applications
The cross product produces a vector perpendicular to both and . Its magnitude equals the area of the parallelogram spanned by and . In surface area calculations, you cross the two tangent vectors and to get both the normal direction and the local area scaling.
The dot product returns a scalar equal to , where is the angle between the vectors. In flux integrals, the dot product of with the surface element extracts how much of the field passes through the surface rather than along it.
These two products work together in surface integrals: the cross product builds the surface element, and the dot product projects the vector field onto it.
Gradient, Divergence, and Curl
These differential operators connect to surface integrals through the major theorems of vector calculus.
- Gradient : Points in the direction of steepest increase of , with magnitude equal to the rate of increase. For a surface defined implicitly by , the gradient is normal to the surface, which provides another route to finding normal vectors.
- Divergence : A scalar that measures the net outward flux per unit volume. The Divergence Theorem relates a flux integral over a closed surface to a triple integral of divergence over the enclosed volume.
- Curl : A vector that captures the local rotational tendency of . Stokes' Theorem relates the flux of the curl through a surface to the circulation of around the surface's boundary.
Understanding these operators now will pay off directly when you reach the Divergence Theorem and Stokes' Theorem, where surface area computation and flux integrals are the central tools.