5️⃣Multivariable Calculus Unit 1 Review
1.2 Vectors in Space
1.2 Vectors in Space
Unit & Topic Study Guides
Vectors and the Geometry of Space
Vector Functions and Space Motion
Partial Derivatives
Multiple Integrals
Vector Fields
Line Integrals and Green's Theorem
Surface Integrals & Stokes' Theorem
Divergence Theorem: Uses and Applications
Vector Basics and Operations
Vectors let you describe quantities that have both a size (magnitude) and a direction in 3D space. They're the foundation for everything else in multivariable calculus, from describing curves and surfaces to computing work and flux. This section covers how to represent vectors, operate on them, and use projections to decompose them.
Vectors in three-dimensional space
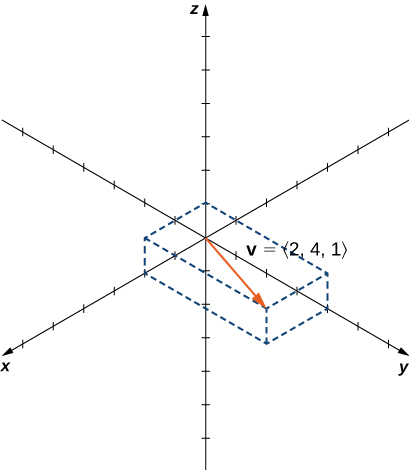
A three-dimensional vector is an ordered triple that specifies a displacement along the x-, y-, and z-axes. Geometrically, you can picture it as an arrow starting at the origin and ending at the point .
Every 3D vector can be built from three standard basis vectors:
- points along the x-axis
- points along the y-axis
- points along the z-axis
Any vector can then be written as a linear combination of these basis vectors:
where , , and are scalar coefficients (just real numbers). So the vector is the same as .
Vector operations in 3D
Addition combines two vectors by adding their corresponding components:
Geometrically, this follows the parallelogram law: place the tails of and together, and the sum is the diagonal of the parallelogram they form. Equivalently, you can use the tip-to-tail method: place the tail of at the head of , and the sum points from the tail of to the head of .
Subtraction works the same way, component by component:
The result is the vector that points from the head of to the head of (when both are drawn from the same starting point).
Scalar multiplication scales a vector by a real number :
- If , the vector stretches or shrinks but keeps the same direction.
- If , the vector also reverses direction.
- If , you get the zero vector .

Vector magnitude and unit vectors
The magnitude (or length) of a vector is found by extending the Pythagorean theorem into 3D:
For example, .
A unit vector has magnitude exactly 1. To turn any nonzero vector into a unit vector pointing in the same direction, divide by its magnitude:
The hat symbol signals "unit vector." This process is called normalizing the vector. For the example above, .
Direction cosines describe the angles a vector makes with each coordinate axis. If , , and are the angles between and the x-, y-, and z-axes respectively, then:
Notice these are just the components of the unit vector . A useful identity to remember: .
Vector projection concepts
Projection lets you decompose one vector into a component along another vector and a component perpendicular to it. Think of it as finding the "shadow" that casts onto the line defined by .
The scalar projection (also called the component of along ) gives you a signed length:
This is positive when has a component in the same direction as , and negative when it points the opposite way.
The vector projection gives you the actual vector lying along :
Notice the difference: the scalar projection divides by , while the vector projection divides by and multiplies by the vector itself.
Once you have the parallel component, the perpendicular component falls out immediately:
This decomposition shows up constantly in applications:
- Force analysis: Resolving a gravitational force into components parallel and perpendicular to an inclined plane.
- Work calculations: Only the component of force along the direction of motion contributes to work.
- Computer graphics: Projections are used to calculate lighting, reflections, and camera angles.