Kalman filtering is a powerful technique in computer vision for estimating system states from noisy measurements. It combines predictions based on system models with new observations to produce optimal estimates, enabling accurate tracking and motion estimation in various applications.
The Kalman filter algorithm consists of prediction and update steps, using linear system models and Gaussian noise assumptions. It's widely used in object tracking, motion estimation, and sensor fusion, with extensions like the Extended Kalman Filter handling nonlinear systems common in real-world scenarios.
Fundamentals of Kalman filtering
- Kalman filtering plays a crucial role in computer vision and image processing by providing a robust method for estimating the state of dynamic systems
- Enables accurate tracking and prediction of object movements in video sequences, enhancing object detection and recognition algorithms
- Forms the foundation for many advanced techniques in sensor fusion and motion estimation used in autonomous vehicles and robotics
State estimation concept
- Involves predicting and updating the state of a system based on noisy measurements and a mathematical model
- Utilizes a recursive algorithm to estimate the optimal state by minimizing the mean squared error
- Combines prior knowledge of the system with new observations to produce more accurate estimates
- Accounts for uncertainties in both the system model and measurements
Linear dynamic systems
- Describes systems where the state evolves linearly over time according to a set of differential equations
- Characterized by state transition matrix and observation matrix
- State equation:
- Observation equation:
- Assumes linearity in both state transitions and measurements, simplifying the filtering process
Gaussian noise assumption
- Assumes process noise and measurement noise follow Gaussian (normal) distributions
- Characterized by zero mean and known covariance matrices and respectively
- Enables the use of probabilistic methods to quantify uncertainties in estimates
- Allows for optimal estimation in linear systems with Gaussian noise
Kalman filter algorithm
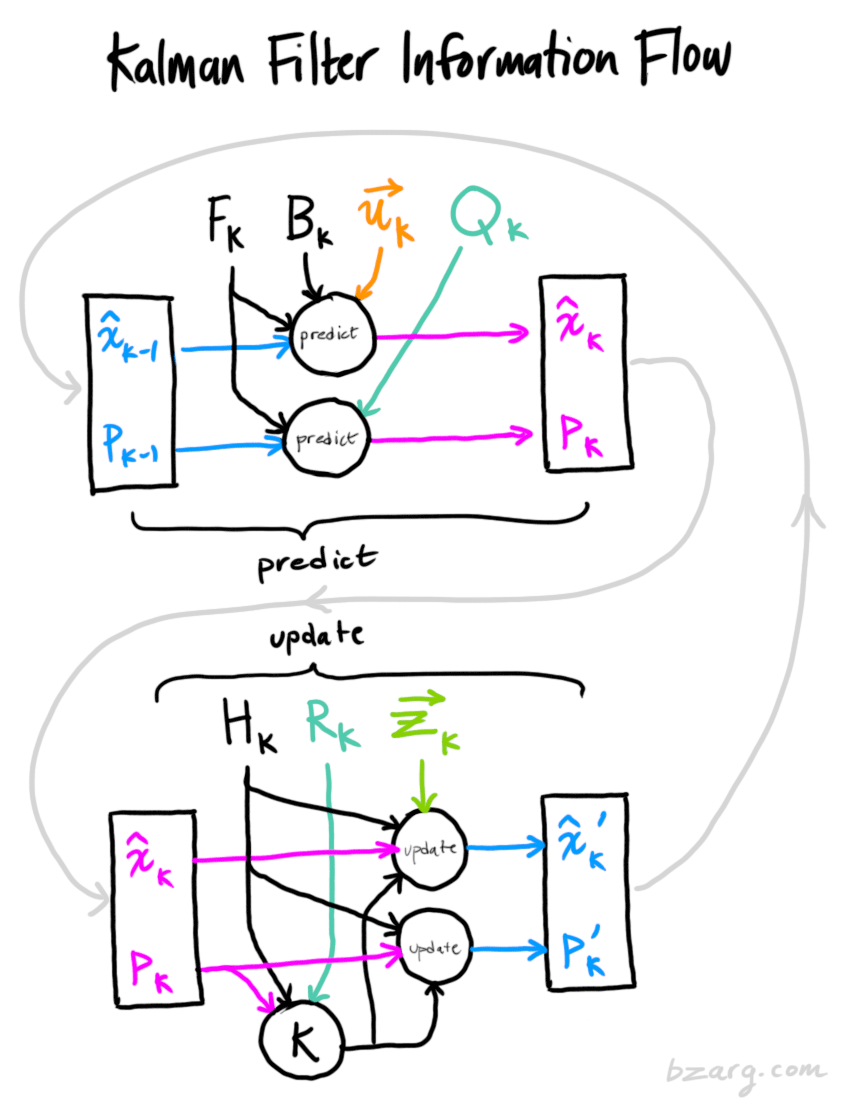
- Consists of two main steps: prediction and update, forming a recursive estimation loop
- Operates on discrete-time systems, making it suitable for digital signal processing applications
- Provides a framework for fusing information from multiple sensors or data sources
Prediction step
- Estimates the a priori state and error covariance based on the previous state and system model
- State prediction:
- Error covariance prediction:
- Accounts for known system dynamics and control inputs to project the state forward in time
Update step
- Incorporates new measurements to refine the state estimate and error covariance
- Innovation calculation:
- State update:
- Error covariance update:
- Improves the estimate by combining predicted state with observed measurements
Gain calculation
- Computes the Kalman gain to optimally weight the influence of predictions and measurements
- Kalman gain formula:
- Balances the trust between the model predictions and new observations
- Adapts dynamically based on the relative uncertainties in the system model and measurements
Mathematical foundations
- Provides the theoretical basis for understanding and implementing Kalman filters
- Enables analysis of filter performance and stability under various conditions
- Facilitates extensions to more complex filtering problems (nonlinear systems)
State space models
- Represents dynamic systems using state variables and differential equations
- Consists of state vector , input vector , and output vector
- Continuous-time model: ,
- Discrete-time model: ,
- Allows for compact representation of multi-input, multi-output systems
Covariance matrices
- Quantifies the uncertainty in state estimates and measurements
- State error covariance matrix represents the uncertainty in the state estimate
- Process noise covariance matrix models the uncertainty in the system dynamics
- Measurement noise covariance matrix represents the uncertainty in sensor measurements
- Plays a crucial role in determining the Kalman gain and filter performance
Linear algebra operations
- Matrix multiplication and addition form the core of Kalman filter computations
- Matrix inversion required for Kalman gain calculation
- Eigenvalue decomposition used for stability analysis and filter tuning
- Cholesky decomposition employed in numerically stable implementations
- Singular value decomposition utilized in handling ill-conditioned matrices

Applications in computer vision
- Kalman filtering finds extensive use in various computer vision tasks
- Enhances the accuracy and robustness of visual tracking and estimation algorithms
- Enables real-time processing of video streams for object detection and localization
Object tracking
- Estimates and predicts the position and velocity of moving objects in video sequences
- Handles occlusions and temporary disappearances by maintaining state estimates
- Applies to multiple object tracking scenarios (pedestrians, vehicles)
- Incorporates appearance models and motion constraints to improve tracking performance
Motion estimation
- Computes camera or object motion parameters from image sequences
- Estimates 6-DOF pose (position and orientation) of cameras or objects
- Fuses visual features with inertial measurements for more accurate motion estimation
- Supports applications in visual odometry and simultaneous localization and mapping (SLAM)
Sensor fusion
- Combines data from multiple sensors to obtain more accurate and reliable estimates
- Integrates visual information with IMU data for improved pose estimation
- Fuses LIDAR and camera data for robust obstacle detection and avoidance
- Enables multi-modal sensing in autonomous vehicles and robotics applications
Extended Kalman filter
- Extends the Kalman filter to handle nonlinear systems commonly encountered in real-world applications
- Approximates nonlinear functions using first-order Taylor series expansions
- Widely used in computer vision tasks involving nonlinear state or measurement models
Nonlinear system handling
- Addresses systems with nonlinear state transition or measurement functions
- State equation:
- Measurement equation:
- Linearizes the nonlinear functions around the current state estimate
- Enables application of Kalman filter principles to a broader class of problems
Linearization techniques
- Computes Jacobian matrices to approximate nonlinear functions
- State transition Jacobian:
- Measurement Jacobian:
- Uses these Jacobians in place of and matrices in the standard Kalman filter equations
- Allows for local linear approximation of nonlinear systems
Limitations and considerations
- Performance degrades for highly nonlinear systems or large state uncertainties
- Linearization errors can lead to filter divergence or suboptimal estimates
- Requires careful tuning of process and measurement noise covariances
- May need frequent re-linearization for systems with rapidly changing dynamics
Unscented Kalman filter
- Provides an alternative approach to handling nonlinear systems without explicit linearization
- Utilizes the unscented transform to propagate mean and covariance through nonlinear functions
- Offers improved accuracy and stability compared to the Extended Kalman filter for many applications
Sigma points
- Set of deterministically chosen sample points that capture the mean and covariance of the state distribution
- Typically uses 2n + 1 sigma points for an n-dimensional state space
- Computed using the current state estimate and a scaling parameter
- Propagated through the nonlinear system and measurement models
Unscented transform
- Statistical technique for estimating the result of applying a nonlinear transformation to a probability distribution
- Computes the mean and covariance of the transformed distribution using weighted sigma points
- Avoids the need for explicit Jacobian calculations
- Captures higher-order moments of the nonlinear transformation
Advantages over EKF
- Provides more accurate estimates for highly nonlinear systems
- Does not require computation of Jacobian matrices, simplifying implementation
- Handles discontinuities and non-differentiable functions more robustly
- Exhibits better numerical stability and convergence properties in many cases
Implementation considerations
- Addresses practical aspects of implementing Kalman filters in real-world computer vision systems
- Ensures efficient and reliable operation of filtering algorithms in resource-constrained environments
- Balances accuracy requirements with computational limitations
Computational complexity
- Scales cubically with the state dimension due to matrix operations
- Requires careful optimization for real-time applications with high-dimensional states
- Utilizes efficient linear algebra libraries (BLAS, LAPACK) for improved performance
- Employs sparse matrix techniques for systems with structured sparsity
Numerical stability
- Addresses issues related to finite precision arithmetic in digital computers
- Utilizes square root formulations to maintain positive definiteness of covariance matrices
- Implements Joseph form of covariance update for improved numerical properties
- Applies regularization techniques to handle ill-conditioned matrices
Parameter tuning
- Involves setting appropriate values for process and measurement noise covariances
- Utilizes domain knowledge and empirical data to estimate noise characteristics
- Employs adaptive techniques to adjust filter parameters online
- Balances filter responsiveness with stability through careful tuning
Kalman filter vs other techniques
- Compares Kalman filtering with alternative estimation methods used in computer vision
- Highlights strengths and weaknesses of different approaches for various applications
- Guides selection of appropriate filtering techniques based on problem characteristics
Particle filters comparison
- Non-parametric approach using Monte Carlo sampling to represent arbitrary distributions
- Better suited for highly nonlinear systems and non-Gaussian noise
- Requires more computational resources than Kalman filters
- Provides more flexibility in modeling complex state spaces and measurement processes
Moving average filters
- Simple technique for smoothing noisy signals by averaging recent measurements
- Computationally efficient but less accurate than Kalman filters for dynamic systems
- Lacks predictive capabilities and optimal state estimation properties
- Suitable for applications with low dynamics and minimal modeling requirements
Complementary filters
- Combines high-frequency and low-frequency measurements to estimate a signal
- Often used in attitude estimation for fusing gyroscope and accelerometer data
- Simpler to implement and tune compared to Kalman filters
- Limited to specific applications where frequency domain separation is applicable
Advanced topics
- Explores extensions and variations of Kalman filtering for more complex estimation problems
- Addresses limitations of standard Kalman filters in certain scenarios
- Provides techniques for improving filter performance and adaptability
Multi-model Kalman filtering
- Uses multiple Kalman filters to handle systems with different operating modes or dynamics
- Switches between or combines estimates from different models based on likelihood or probabilities
- Applies to systems with abrupt changes in dynamics or measurement characteristics
- Improves robustness in scenarios with model uncertainties or multiple hypotheses
Adaptive Kalman filtering
- Adjusts filter parameters online to adapt to changing system dynamics or noise characteristics
- Estimates process and measurement noise covariances from observed data
- Implements forgetting factors to give more weight to recent measurements
- Enhances performance in systems with time-varying or uncertain parameters
Square root Kalman filter
- Reformulates the Kalman filter equations using Cholesky factorization of covariance matrices
- Improves numerical stability and accuracy, especially for ill-conditioned problems
- Reduces the dynamic range of computations, mitigating issues with finite precision arithmetic
- Particularly useful in applications requiring high precision or long-term stability