Template matching is a fundamental technique in computer vision for finding specific patterns within images. It compares a small template image against regions of a larger image to identify similarities, enabling object detection, facial recognition, and medical image analysis.
This method forms the basis for more advanced image processing techniques. Various algorithms like cross-correlation and sum of squared differences quantify similarity between templates and image regions. Optimization techniques and machine learning approaches enhance template matching's performance and versatility.
Fundamentals of template matching
- Template matching serves as a foundational technique in computer vision for locating specific patterns within images
- Utilizes a predefined template to search for similar regions in a larger image, enabling object detection and recognition
- Forms the basis for more advanced image processing and analysis techniques in computer vision applications
Definition and purpose
- Pattern recognition method identifies specific image regions matching a predefined template
- Compares a small image (template) against overlapping areas of a larger image
- Quantifies similarity between template and image regions using correlation or difference measures
- Enables object detection, feature tracking, and image alignment in various computer vision tasks
Types of templates
- Binary templates consist of black and white pixels, useful for simple shape matching
- Grayscale templates contain intensity values, allowing for more detailed pattern matching
- Color templates utilize RGB or other color spaces for complex object recognition
- Edge templates focus on object contours, robust to illumination changes
- Texture templates capture surface patterns, effective for material recognition
Applications in computer vision
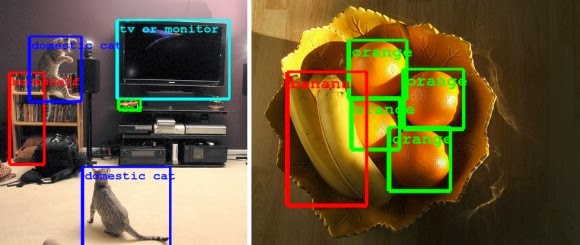
- Object detection locates specific items within images or video frames
- Facial recognition identifies and verifies individuals based on facial features
- Medical image analysis detects abnormalities or specific structures in medical scans
- Industrial quality control inspects products for defects or inconsistencies
- Optical character recognition (OCR) converts printed or handwritten text into machine-encoded text
Template matching algorithms
Cross-correlation method
- Measures similarity between template and image regions by computing their dot product
- Slides template over image, calculating correlation at each position
- Higher correlation values indicate better matches between template and image region
- Formula for cross-correlation:
- T represents the template, I represents the image
- Sensitive to intensity variations, may produce false positives in bright image areas
Sum of squared differences
- Calculates dissimilarity between template and image regions
- Computes squared differences between corresponding pixel values
- Lower SSD values indicate better matches between template and image region
- Formula for sum of squared differences:
- More robust to intensity variations compared to cross-correlation
- Computationally efficient, suitable for real-time applications
Normalized cross-correlation
- Addresses limitations of standard cross-correlation by normalizing pixel values
- Computes correlation coefficient between template and image region
- Ranges from -1 to 1, with 1 indicating perfect match
- Formula for normalized cross-correlation:
- Robust to linear intensity changes, suitable for varying lighting conditions
- Computationally more expensive than standard cross-correlation
Implementation techniques
Sliding window approach
- Moves template over image in a raster scan pattern, typically left to right and top to bottom
- Computes similarity measure at each position, creating a response map
- Identifies local maxima in response map as potential matches
- Allows for exhaustive search but can be computationally intensive for large images
- Optimized using techniques like step size adjustment or early termination criteria
Multi-scale template matching
- Addresses size variations between template and target object in image
- Creates image pyramid by repeatedly downsampling original image
- Performs template matching at each scale level of the pyramid
- Combines results from different scales to identify best matches
- Enables detection of objects at various sizes without resizing the template
- Increases computational cost but improves robustness to scale variations
Rotation-invariant matching
- Handles rotated instances of the template in the target image
- Generates rotated versions of the template at different angles
- Performs template matching with each rotated template
- Selects best match across all rotations for each image position
- Circular templates can achieve rotation invariance without explicit rotation
- Increases computational complexity but enables detection of rotated objects
Performance optimization
Pyramid representation
- Creates multi-resolution image pyramid by successively downsampling the input image
- Performs template matching at coarser levels first, refining results at finer levels
- Reduces computational cost by quickly eliminating unlikely match locations
- Allows for efficient multi-scale matching without resizing the template
- Improves performance for large images or when searching for objects at multiple scales
Fast Fourier Transform (FFT)
- Utilizes frequency domain representation to accelerate template matching
- Converts both template and image to frequency domain using FFT
- Performs element-wise multiplication of frequency representations
- Applies inverse FFT to obtain spatial domain correlation result
- Reduces computational complexity from O(N^4) to O(N^2 log N) for NxN images
- Particularly effective for large templates or when matching multiple templates
Integral images
- Precomputes cumulative sum of pixel values in the image
- Enables rapid calculation of sum or average of rectangular image regions
- Accelerates template matching algorithms based on sum of squared differences
- Reduces computational complexity for each window evaluation
- Especially useful for real-time applications or when using large templates
Challenges and limitations
Occlusion and partial matching
- Objects partially hidden or obstructed in images pose challenges for template matching
- Traditional methods struggle with incomplete object appearances
- Partial matching techniques (matching subregions of template) can improve robustness
- Deformable templates or part-based models address occlusion issues
- Requires careful threshold selection to balance false positives and false negatives
Illumination and scale variations
- Changes in lighting conditions affect pixel intensities, impacting matching accuracy
- Scale differences between template and target object in image reduce matching performance
- Normalized cross-correlation helps mitigate illumination variations
- Multi-scale matching techniques address scale differences
- Preprocessing steps (histogram equalization, edge detection) can improve robustness
Computational complexity
- Template matching can be computationally expensive, especially for large images or templates
- Exhaustive search approaches may not be suitable for real-time applications
- Optimization techniques (FFT, integral images) reduce computational burden
- Trade-off between accuracy and speed must be considered for specific applications
- Parallel processing or GPU acceleration can improve performance for large-scale matching
Advanced template matching
Deformable templates
- Allows for non-rigid transformations of the template to match object variations
- Incorporates shape models to adapt template to different object instances
- Active contour models (snakes) deform template boundaries to fit image features
- Statistical shape models capture variations in object appearance across a population
- Improves matching accuracy for objects with flexible or articulated structures
Feature-based matching
- Extracts distinctive features (corners, edges, keypoints) from both template and image
- Matches features between template and image using descriptors (SIFT, SURF, ORB)
- Estimates transformation between matched features to locate template in image
- Robust to partial occlusion and geometric transformations
- Computationally efficient for large images or multiple template matching
Machine learning approaches
- Utilizes trained models to improve template matching performance
- Convolutional Neural Networks (CNNs) learn hierarchical features for object detection
- Template matching serves as region proposal mechanism for deep learning models
- Combines traditional template matching with learned features for improved accuracy
- Enables adaptation to complex object variations and background clutter
Evaluation metrics
Precision and recall
- Precision measures proportion of correct matches among all detected matches
- Recall measures proportion of correct matches among all actual instances in image
- Formula for precision:
- Formula for recall:
- F1-score combines precision and recall into a single metric for overall performance
Intersection over Union (IoU)
- Measures overlap between predicted bounding box and ground truth bounding box
- Calculated as area of intersection divided by area of union of the two boxes
- Formula for IoU:
- Commonly used threshold (0.5 or 0.7) determines successful match
- Higher IoU indicates more accurate localization of matched objects
Receiver Operating Characteristic (ROC)
- Plots true positive rate against false positive rate at various threshold settings
- Visualizes trade-off between sensitivity and specificity of template matching
- Area Under the Curve (AUC) quantifies overall performance of matching algorithm
- Allows comparison of different template matching methods or parameter settings
- Helps in selecting optimal threshold for specific application requirements
Template matching vs alternatives
Template matching vs feature detection
- Template matching searches for entire object pattern, feature detection identifies distinctive points
- Feature detection more robust to occlusion and geometric transformations
- Template matching provides precise localization, feature detection offers faster matching
- Feature detection requires less prior knowledge about object appearance
- Hybrid approaches combine strengths of both methods for improved performance
Template matching vs deep learning
- Template matching relies on predefined patterns, deep learning learns features from data
- Deep learning models (CNNs) can handle complex object variations and backgrounds
- Template matching computationally efficient for simple objects, deep learning for complex scenes
- Deep learning requires large labeled datasets and significant computational resources for training
- Template matching serves as preprocessing step or fallback method in deep learning pipelines
Real-world applications
Object detection and tracking
- Locates and follows specific objects in images or video streams
- Used in surveillance systems to identify and track persons of interest
- Enables autonomous vehicle systems to detect and track other vehicles, pedestrians
- Facilitates augmented reality applications by anchoring virtual objects to real-world targets
- Supports robotics applications for object manipulation and navigation
Image registration
- Aligns multiple images of the same scene taken from different viewpoints or times
- Crucial for medical image analysis, aligning scans from different modalities (MRI, CT)
- Enables creation of panoramic images by stitching multiple overlapping photographs
- Supports remote sensing applications, aligning satellite or aerial imagery
- Facilitates motion correction in video stabilization and super-resolution techniques
Quality control in manufacturing
- Inspects products on assembly lines for defects or inconsistencies
- Verifies correct placement and orientation of components in electronic assemblies
- Checks packaging for proper labeling, sealing, and overall quality
- Measures dimensions and tolerances of manufactured parts for compliance
- Enables automated sorting and grading of products based on visual characteristics