Inverse trigonometric functions flip the script on their regular counterparts. They take values and give you angles, unlike sine or cosine that do the opposite. These functions are key players in calculus, helping us solve tricky problems.
Knowing how to work with inverse trig functions opens up a world of applications. From pendulum swings to projectile paths, these tools help us model real-world scenarios. Their derivatives are particularly useful in physics and engineering calculations.
Inverse Trigonometric Functions
Inverse trigonometric function properties
- Inverse trigonometric functions undo the operations performed by standard trigonometric functions (, , )
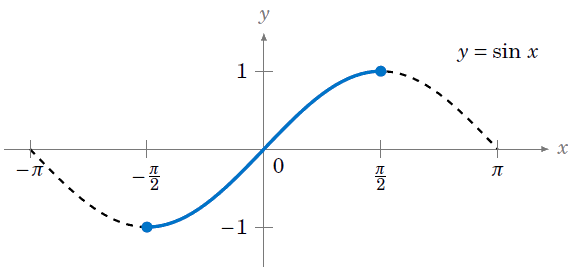
- returns the angle whose sine is ()
- returns the angle whose cosine is ()
- returns the angle whose tangent is ()
- Inverse trigonometric functions have restricted domains to ensure they are one-to-one functions
- and have a domain of , as the sine and cosine functions output values between -1 and 1
- has a domain of , as the tangent function can output any real number
- Inverse trigonometric functions have limited ranges to ensure they are one-to-one functions
- has a range of , as angles in this range produce unique sine values
- has a range of , as angles in this range produce unique cosine values
- has a range of , as angles in this range produce unique tangent values
- Inverse trigonometric functions and their corresponding trigonometric functions cancel each other out when composed
- for in the domain of
- for in the domain of
- for in the domain of
- for in the range of
- for in the range of
- for in the range of
Derivatives of inverse trig functions
- The derivative of the inverse sine function is
- Derived using implicit differentiation and the Pythagorean identity
- Let , then . Differentiating both sides with respect to yields . Solving for and substituting gives the result
- The derivative of the inverse cosine function is
- Derived using implicit differentiation and the Pythagorean identity
- Let , then . Differentiating both sides with respect to yields . Solving for and substituting gives the result
- The derivative of the inverse tangent function is
- Derived using implicit differentiation and the identity
- Let , then . Differentiating both sides with respect to yields . Solving for and substituting gives the result

Applications of Inverse Trigonometric Derivatives
Application of inverse trig derivatives
- Differentiate expressions involving inverse trigonometric functions
- Example:
- Find the equation of the tangent line to a curve involving inverse trigonometric functions at a given point
- Example: The tangent line to the curve at has the equation
- Determine the points where the derivative of a function involving inverse trigonometric functions is undefined or zero
- Example: is undefined at and zero at
Real-world uses of inverse trig derivatives
- Physics applications involve modeling pendulum motion
- Example: A pendulum's angle with the vertical is , where is the horizontal displacement and is the pendulum length. The angular velocity when is
- Engineering applications involve modeling projectile motion
- Example: A projectile launched from the ground has an angle of elevation , where is the initial velocity, is the acceleration due to gravity, and is the horizontal distance. The rate of change of the angle of elevation with respect to the horizontal distance when is