What is AP Physics 1 unit 5?
Unit 5 is the rotational counterpart to the linear dynamics you studied in Units 1 and 2. Every major idea has a direct parallel: angular displacement mirrors linear displacement, torque mirrors force, and rotational inertia mirrors mass. The unit builds from describing how things spin, to explaining why they spin the way they do.
Torque and rotational dynamics describe how forces cause or prevent rotation. Torque depends on force magnitude, distance from the axis, and the angle of application. Rotational inertia resists changes in spinning motion. When net torque is zero, angular velocity stays constant. When net torque is nonzero, angular acceleration results according to α = τ_net / I.
Rotational kinematics mirrors linear kinematics
Angular displacement (Δθ), angular velocity (ω), and angular acceleration (α) follow the same mathematical structure as their linear counterparts. Under constant angular acceleration, you can use the rotational kinematic equations ω = ω₀ + αt and θ = θ₀ + ω₀t + ½αt² just as you used v = v₀ + at in Unit 1.
Torque is force applied with a lever arm
Only the component of force perpendicular to the position vector from the axis causes rotation. The magnitude is τ = rF sinθ, where r is the distance from the axis to the point of application and θ is the angle between the force and that position vector. A longer lever arm produces more torque for the same force.
Rotational inertia depends on mass distribution
Rotational inertia I = mr² for a point mass tells you that mass farther from the axis contributes more resistance to rotation. For a system of objects, I_total = Σmᵢrᵢ². The parallel axis theorem I' = I_cm + Md² lets you find rotational inertia about any axis parallel to one through the center of mass.
Rotation follows the same laws as linear motion, just with different variablesEvery linear concept in Units 1 and 2 has a rotational equivalent in Unit 5. Force becomes torque, mass becomes rotational inertia, and linear acceleration becomes angular acceleration. Newton's second law in rotational form, α = τ_net / I, is the engine of this unit. When net torque is zero, the system is in rotational equilibrium and angular velocity does not change, exactly as zero net force keeps linear velocity constant. Recognizing these parallels lets you transfer problem-solving strategies you already know directly into rotational scenarios.
Unit 5 review notes
5.1
Describing Rotation Over Time
Rotational kinematics uses angular displacement Δθ (in radians), angular velocity ω (rad/s), and angular acceleration α (rad/s²) to describe how a rigid system rotates. These quantities follow the same relationships as linear kinematics, so under constant angular acceleration the same equation structure applies. Counterclockwise is typically positive by convention. A rigid system holds its shape, meaning all points share the same ω and α even though they travel different linear distances.
- Angular displacement Δθ: The angle in radians through which a point on a rigid system rotates about a specified axis; Δθ = θ - θ₀.
- Average angular velocity ω_avg: Change in angular displacement divided by elapsed time: ω_avg = Δθ / Δt.
- Average angular acceleration α_avg: Change in angular velocity divided by elapsed time: α_avg = Δω / Δt.
- Constant angular acceleration equations: ω = ω₀ + αt and θ = θ₀ + ω₀t + ½αt² apply when α is uniform, directly paralleling the linear kinematic equations from Unit 1.
- Sign convention: One direction of rotation (usually counterclockwise) is defined as positive; the opposite direction is negative. Consistency within a problem is required.
A wheel starts from rest and reaches ω = 12 rad/s in 4 s under constant angular acceleration. What is α, and how many radians does it rotate through?
| Linear quantity | Symbol | Rotational equivalent | Symbol |
|---|
| Displacement | Δx | Angular displacement | Δθ |
| Velocity | v | Angular velocity | ω |
| Acceleration | a | Angular acceleration | α |
| v = v₀ + at | | ω = ω₀ + αt | |
5.2
Linking Angular and Linear Quantities
For any point at distance r from a fixed axis, linear and angular quantities are connected by three key equations: arc length s = rθ, tangential speed v = rω, and tangential acceleration a_T = rα. Because all points in a rigid system share the same ω and α, a point farther from the axis moves faster and accelerates more than a point closer to the axis. This relationship is essential for analyzing wheels, gears, and rolling objects.
- Arc length s = rθ: The linear distance a point travels along its circular path equals the radius times the angular displacement in radians.
- Tangential speed v = rω: The instantaneous linear speed of a point on a rotating rigid system; larger r means faster linear speed for the same ω.
- Tangential acceleration a_T = rα: The component of linear acceleration tangent to the circular path; equals radius times angular acceleration.
- Same ω and α for all points: Every point in a rigid system rotates with identical angular velocity and angular acceleration, regardless of its distance from the axis.
- Rolling without slipping: For an object rolling without slipping, the contact point is instantaneously at rest and v_cm = rω relates the center-of-mass speed to the angular velocity.
A disk of radius 0.5 m rotates at ω = 6 rad/s. What is the tangential speed of a point on the rim, and what is the tangential speed of a point 0.25 m from the center?
| Equation | Relates | Key point |
|---|
| s = rθ | Arc length to angular displacement | θ must be in radians |
| v = rω | Tangential speed to angular velocity | Larger r gives larger v |
| a_T = rα | Tangential acceleration to angular acceleration | Distinct from centripetal acceleration |
5.3
Torque: Force That Causes Rotation
Torque measures how effectively a force rotates a rigid system about an axis. Only the component of force perpendicular to the position vector from the axis to the point of application produces torque. The magnitude is τ = rF sinθ = rF⊥, where θ is the angle between the force vector and the position vector. The lever arm is the perpendicular distance from the axis to the line of action of the force. Force diagrams, similar to free-body diagrams, show force magnitudes, directions, and points of application relative to the axis.
- Torque τ = rF sinθ: The magnitude of torque equals the distance from the axis to the point of force application times the force magnitude times the sine of the angle between them.
- Lever arm: The perpendicular distance from the axis of rotation to the line of action of the force; a longer lever arm produces greater torque for the same force.
- Perpendicular force component F⊥: Only the component of force perpendicular to the position vector contributes to torque; the parallel component produces no rotation.
- Force diagram: A diagram used to analyze torques on a rigid system, showing force magnitudes, directions, and locations of application relative to the axis of rotation.
- Sign of torque: Torques that tend to rotate the system counterclockwise are typically positive; clockwise torques are negative. Consistency within a problem is required.
A 20 N force is applied at 0.4 m from a pivot at an angle of 30° to the position vector. What is the magnitude of the torque?
| Scenario | Lever arm | Torque effect |
|---|
| Force perpendicular to r (θ = 90°) | r | Maximum torque: τ = rF |
| Force at angle θ to r | r sinθ | Reduced torque: τ = rF sinθ |
| Force parallel to r (θ = 0°) | 0 | Zero torque |
5.4
Rotational Inertia: Resistance to Spinning
Rotational inertia I is the rotational analog of mass. It measures how strongly a rigid system resists changes in its rotation and depends on both the total mass and how that mass is distributed relative to the axis. For a point mass, I = mr². For a collection of objects, I_total = Σmᵢrᵢ². Mass farther from the axis contributes more to I, which is why a hoop has greater rotational inertia than a solid disk of the same mass and radius. The parallel axis theorem I' = I_cm + Md² gives the rotational inertia about any axis parallel to one through the center of mass.
- I = mr²: Rotational inertia of a single point mass m at perpendicular distance r from the axis of rotation.
- I_total = Σmᵢrᵢ²: Total rotational inertia of a system of discrete masses is the sum of each mass times the square of its distance from the axis.
- Mass distribution effect: Rotational inertia is greater when mass is concentrated farther from the axis; moving mass outward increases I even if total mass stays the same.
- Parallel axis theorem: I' = I_cm + Md², where d is the perpendicular distance between the new axis and the center-of-mass axis; rotational inertia is minimum when the axis passes through the center of mass.
- Extended object formulas: Formulas for hoops, disks, and rods are provided on the exam; students need qualitative understanding of why shape and axis placement affect I.
Two 2 kg masses are placed 0.3 m and 0.6 m from an axis. What is the total rotational inertia of the system? Which mass contributes more, and why?
| Object | Axis location | Relative rotational inertia |
|---|
| Hoop (mass M, radius R) | Through center | Larger (all mass at R) |
| Solid disk (mass M, radius R) | Through center | Smaller (mass distributed from 0 to R) |
| Rod (mass M, length L) | Through center | Smaller than through end |
| Rod (mass M, length L) | Through end | Larger (mass farther on average) |
5.5
Rotational Equilibrium and Constant Angular Velocity
A system is in rotational equilibrium when the net torque on it is zero (Στᵢ = 0), meaning its angular velocity remains constant. This is the rotational form of Newton's first law. A system can be in rotational equilibrium without being in translational equilibrium, and vice versa. To solve balance problems, choose a convenient pivot point, identify all torques with their signs, and set the sum equal to zero. Force diagrams show both the forces and their points of application relative to the chosen axis.
- Rotational equilibrium condition: Στᵢ = 0; the net torque about any axis is zero, so angular velocity does not change.
- Rotational form of Newton's first law: A system maintains constant angular velocity (including ω = 0) unless a nonzero net torque acts on it.
- Independent of translational equilibrium: A system can spin at constant ω while its center of mass accelerates, or be stationary while experiencing unbalanced torques.
- Pivot point choice: You can choose any point as the axis for torque calculations; choosing a point where an unknown force acts eliminates that force from the torque equation.
- Force diagram for equilibrium: Shows all forces, their magnitudes, directions, and positions relative to the axis, enabling identification of clockwise and counterclockwise torques.
A uniform 4 m beam of mass 10 kg is supported at one end. A 30 N downward force is applied 1 m from the free end. What upward force at the free end keeps the beam in rotational equilibrium about the supported end?
| Condition | Net force | Net torque | Result |
|---|
| Full static equilibrium | Zero | Zero | No linear or angular acceleration |
| Rotational equilibrium only | Nonzero | Zero | Linear acceleration, constant ω |
| Translational equilibrium only | Zero | Nonzero | Angular acceleration, constant v_cm |
| Neither equilibrium | Nonzero | Nonzero | Both linear and angular acceleration |
5.6
Newton's Second Law for Rotating Systems
When the net torque on a rigid system is not zero, the system undergoes angular acceleration. The rotational form of Newton's second law is α_sys = τ_net / I_sys. Angular acceleration is directly proportional to net torque and inversely proportional to rotational inertia. For systems that involve both linear and rotational motion, such as a mass hanging from a pulley, you must perform separate linear and rotational analyses and connect them through the constraint equations from Topic 5.2.
- α_sys = τ_net / I_sys: The angular acceleration of a rigid system equals the net torque divided by the rotational inertia; the rotational analog of a = F_net / m.
- Nonzero net torque causes angular acceleration: If Στ ≠ 0, angular velocity must be changing; the direction of α matches the direction of τ_net.
- Proportionality relationships: Doubling τ_net doubles α; doubling I_sys halves α for the same net torque. These functional dependence relationships are commonly tested.
- Combined linear and rotational analysis: For systems like a block on a string wrapped around a pulley, apply F_net = ma to the block and τ_net = Iα to the pulley separately, then use a = rα to connect them.
- Internal torques cancel: Only external torques contribute to the net torque that changes a system's angular velocity; internal torques between parts of the system cancel in pairs.
A pulley of rotational inertia 0.2 kg·m² has a net torque of 0.8 N·m applied to it. What is its angular acceleration? If the net torque doubles and I stays the same, what happens to α?
| Linear (Unit 2) | Rotational (Unit 5) |
|---|
| F_net = ma | τ_net = Iα |
| a = F_net / m | α = τ_net / I |
| Larger m resists acceleration | Larger I resists angular acceleration |
| ΣF = 0 means constant v | Στ = 0 means constant ω |
Practice AP Physics 1 unit 5 questions
Try stimulus-based AP practice questions and written prompts after you review the notes.
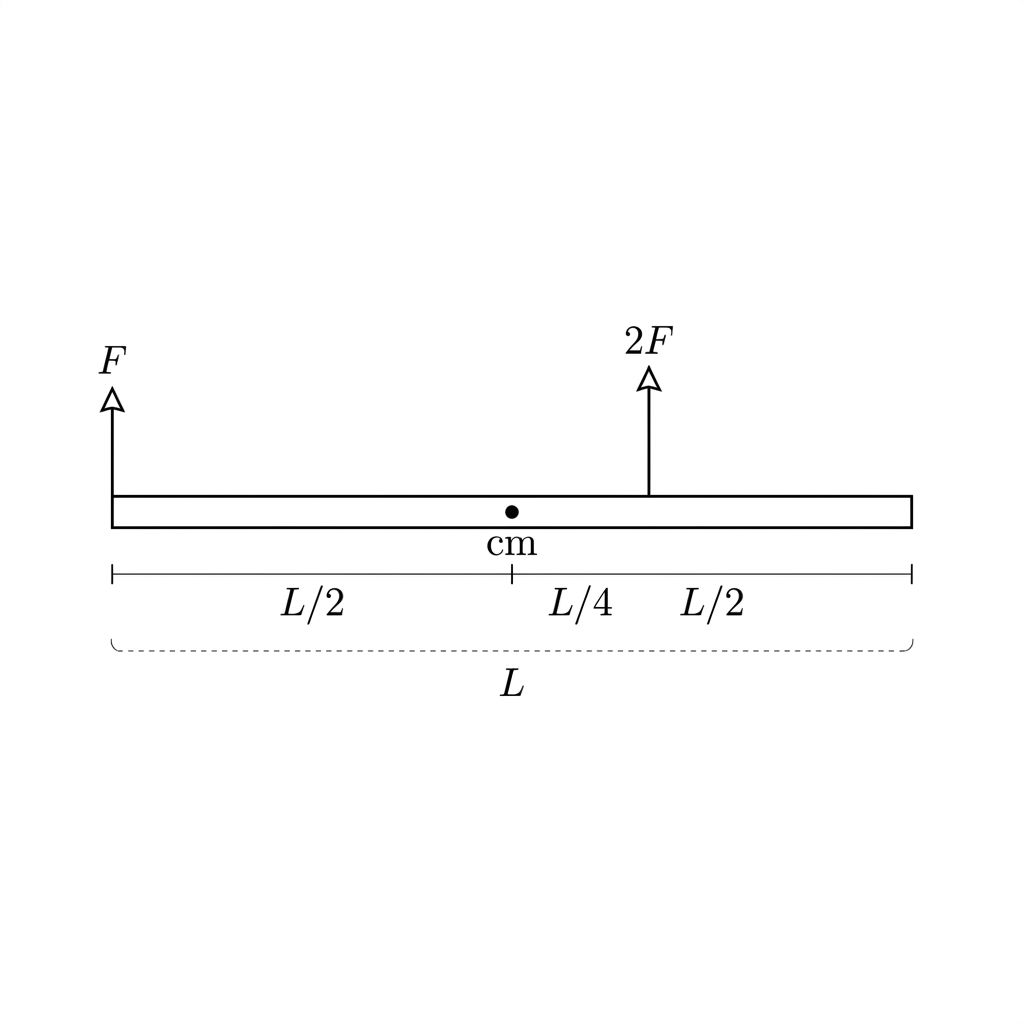
A satellite, modeled as a uniform rod of length L, is initially at rest. Two thrusters apply constant forces of magnitude F and 2F perpendicular to the rod at the positions shown in the figure.
QuestionWhich claim correctly describes the angular velocity of the satellite while the thrusters are firing?
It remains constant at zero because the net torque exerted on the satellite is zero.
It increases at a constant rate because the net force exerted on the satellite is 3F.
It increases at a constant rate because the force 2F is greater in magnitude than the force F.
It increases at a constant rate because the forces are applied at different distances from the center of mass.
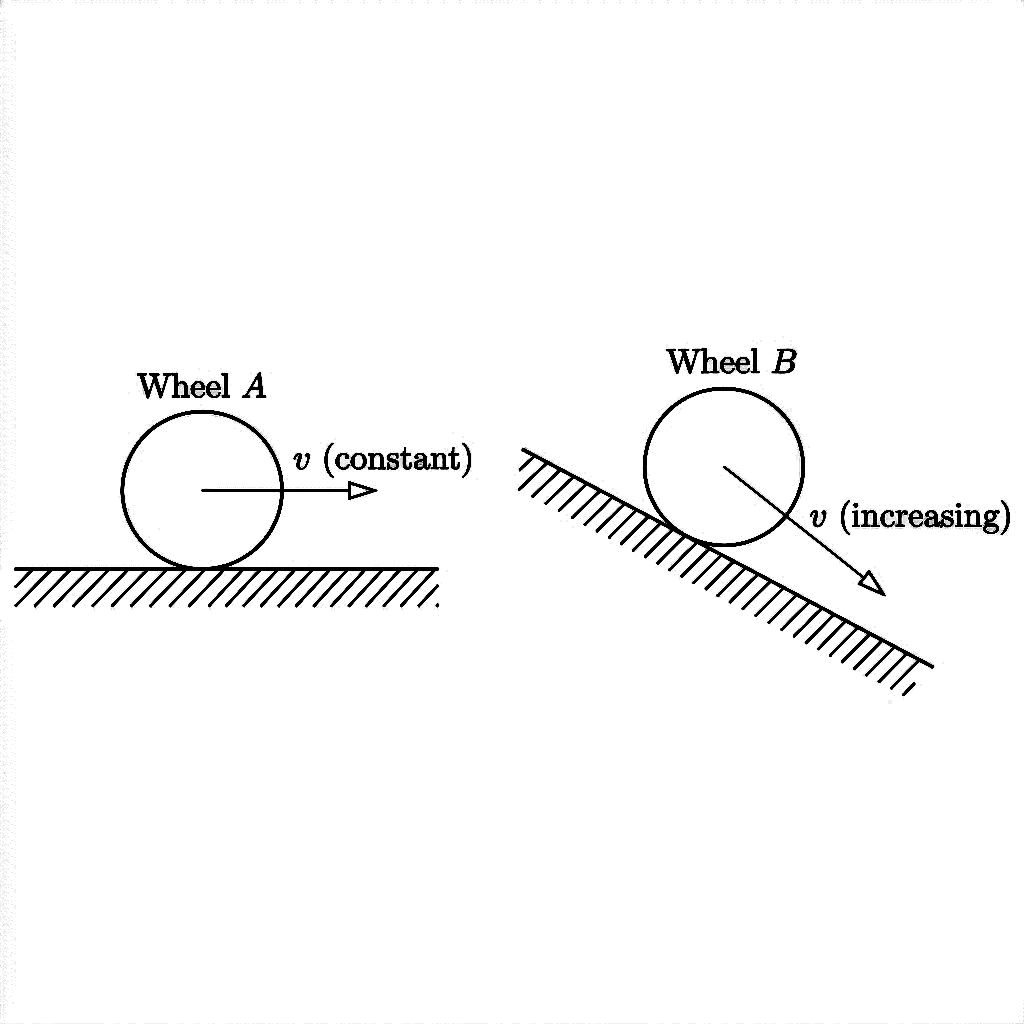
Wheel A rolls without slipping at a constant speed along a horizontal surface. Wheel B rolls without slipping down an inclined plane, increasing in speed as it moves.
QuestionHow do the magnitudes of the net torques about the center of mass for Wheel A and Wheel B compare, and what does this indicate about their rotational equilibrium?
τA<τB; Wheel A is in rotational equilibrium, while Wheel B is not.
τA<τB; neither wheel is in rotational equilibrium because both are moving.
τA=τB; both wheels are in rotational equilibrium because they roll without slipping.
τA>τB; Wheel A requires a greater net torque to maintain a constant speed on a horizontal surface.
3. Students are investigating how torque affects the angular acceleration of a rotating system.
Figure 1. Disk-pulley apparatus for angular acceleration
Figure 2. Grid for linearized relationship plot
Table 1. Hanging mass and angular acceleration data
Describe how the students could use measurements of α for different values of m to create a linear graph and how the slope of that graph could be used to determine the rotational inertia I. Clearly identify what quantities are plotted on each axis and how the slope is related to I.
m (kg) | α (rad/s^2) |
|---|
0.050 | 1.45 |
0.070 | 1.96 |
0.090 | 2.44 |
0.110 | 2.88 |
0.130 | 3.33 |
The students decide to graph 1/m on the horizontal axis.
i. Indicate what measured or calculated quantity could be plotted on the vertical axis to yield a linear graph whose slope can be used to calculate an experimental value for the rotational inertia I.
Vertical axis: Horizontal axis: 1/m
ii. On the blank grid provided, create a graph of the quantities indicated in part C(i) that can be used to determine I.
• Use Table 2 to record the data points or calculated quantities that you will plot.
• Clearly label the vertical axis, including units as appropriate.
• Plot the points you recorded in Table 2.
iii. Draw a straight best-fit line for the data graphed in part C(ii).
4. In Scenario 1, a uniform solid disk of mass M=2.0 kg and radius R=0.40 m can rotate without friction about a fixed horizontal axle through its center. A light string is wrapped around the rim of the disk and is pulled tangentially with a constant force of magnitude F1=6.0 N, as shown in Figure 1. The disk starts from rest and has an initial angular acceleration of magnitude α1. All frictional forces are negligible, and the string does not slip on the disk.
In Scenario 2, the same disk rotates about the same axle. A light string is wrapped around a smaller radius pulley rigidly attached to the disk so that the string is tangent to a circle of radius r=0.20 m. The string is pulled tangentially with the same constant force magnitude F2=6.0 N, as shown in Figure 2. The disk again starts from rest and has an initial angular acceleration of magnitude α2. All frictional forces are negligible, and the string does not slip.
Figure 1. Scenario 1: A constant tangential pull F₁ = 6.0 N applied at the outer rim (radius R = 0.40 m) of a uniform solid disk (mass M = 2.0 kg).
Figure 2. Scenario 2: The same disk (M = 2.0 kg, R = 0.40 m) with a rigidly attached inner pulley (radius r = 0.20 m) pulled by the same constant tangential force F₂ = 6.0 N.
• α1>α2
• α1<α2
• α1=α2
Justify your answer in terms of ALL torques exerted on the disk about the axle in each scenario. Use qualitative reasoning beyond referencing equations.
1. A uniform solid disk of radius 0.20 m and mass 2.0 kg is mounted on a low-friction axle through its center, as shown in Figure 1. A light string is wrapped around the rim of the disk and is pulled by a student with a constant force of 8.0 N, causing the disk to rotate.
Figure 1. Uniform solid disk with tangential force
Figure 2. Axes for angular velocity vs. time
i. On the axes shown in Figure 2, sketch a graph of the disk’s angular velocity ω as a function of time t from t = 0 to t = 3.0 s.
ii. Derive an expression for the magnitude of the angular acceleration α of the disk during the time interval from t = 0 to t = 1.5 s in terms of the given quantities and physical constants, as appropriate. Begin your derivation by writing a fundamental physics principle or an equation from the reference information.
iii. Derive an expression for the magnitude of the linear speed v of a point on the rim of the disk at t = 1.5 s in terms of the given quantities and physical constants, as appropriate. Begin your derivation by writing a fundamental physics principle or an equation from the reference information.
Greater than
Less than
Equal to
Justify your response.