Input-state linearization transforms nonlinear systems into equivalent linear ones through coordinate changes and state feedback. This simplifies control design by allowing linear techniques to be applied to nonlinear systems, making complex problems more manageable.
The method works for feedback linearizable systems that meet specific conditions. By converting nonlinear dynamics into linear ones, we can use familiar tools like pole placement and optimal control to achieve desired performance in the original system.
Input-State Linearization Concept
Overview of Input-State Linearization
- Input-state linearization transforms a nonlinear system into an equivalent linear system through a change of coordinates and state feedback
- Simplifies the analysis and design of nonlinear control systems by converting them into linear systems, which have well-established control techniques
- Applicable to a class of nonlinear systems called feedback linearizable systems, which satisfy certain conditions on their structure and controllability
Transformed Linear System Properties
- The transformed linear system obtained through input-state linearization retains the same state variables as the original nonlinear system
- The dynamics of the transformed system are now linear with respect to the new input
- Enables the application of linear control techniques, such as pole placement and optimal control, to nonlinear systems (LQR, pole placement)
Conditions for Input-State Linearization
Necessary and Sufficient Conditions
- Consider a nonlinear system described by the state equations: , where is the state vector, is the input, and and are smooth vector fields
- The vector fields must be linearly independent
- denotes the Lie bracket of and
- is the dimension of the state space
- The distribution spanned by the vector fields must be involutive
- The Lie bracket of any two vector fields in the distribution is also in the distribution
Diffeomorphism for Linearization
- If the necessary and sufficient conditions are satisfied, there exists a diffeomorphism that transforms the nonlinear system into an equivalent linear system
- A diffeomorphism is a smooth and invertible transformation
- The diffeomorphism consists of a change of coordinates and a state feedback control law
- is the new input to the linearized system
- The transformed linear system has the form , where and are constant matrices determined by the diffeomorphism
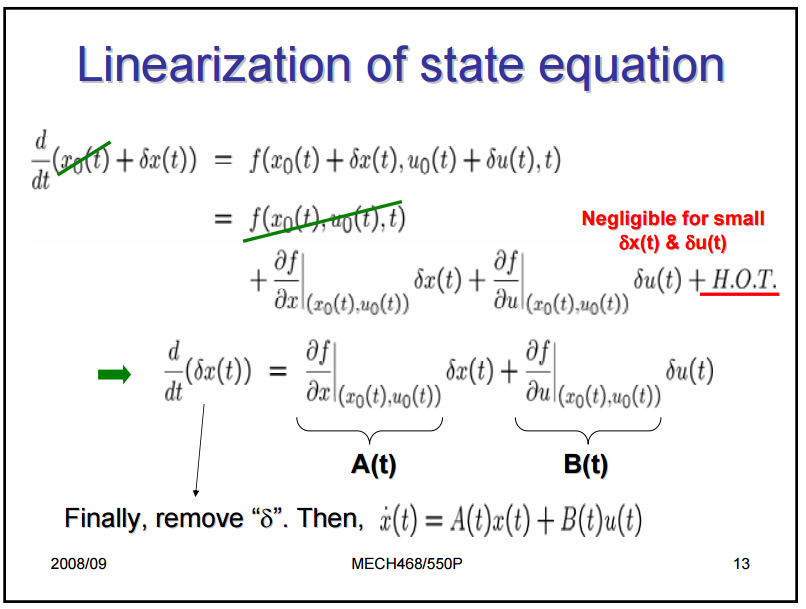
Linearization of Nonlinear Systems
Transformation Process
- Given a nonlinear system satisfying the conditions for input-state linearization, find the diffeomorphism that linearizes the system
- The change of coordinates is obtained by solving partial differential equations derived from the Lie derivatives of the output function along and
- The state feedback control law is determined by the choice of the new input and the requirement to cancel out nonlinearities in the system dynamics
Transformed Linear System
- The resulting transformed linear system has the form , where and are constant matrices, and is the new input
- The transformed system preserves the state variables of the original nonlinear system but has linear dynamics with respect to the new input
- Input-state linearization can be applied to various classes of nonlinear systems (feedback linearizable systems, strict feedback systems, pure feedback systems)
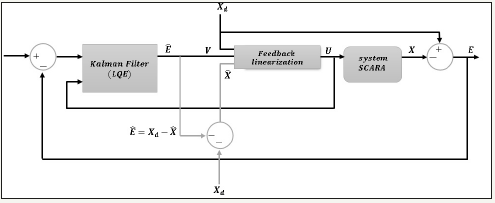
State Feedback Control for Linearized Systems
Controller Design
- Once a nonlinear system is transformed into an equivalent linear system, linear control techniques can be applied to design state feedback controllers
- The state feedback control law for the linearized system has the form , where is the feedback gain matrix and is the state vector of the linearized system
- The feedback gain matrix can be designed using pole placement techniques to achieve desired closed-loop pole locations
- Desired pole locations are chosen based on performance specifications (settling time, overshoot, stability margins)
- Optimal control techniques, such as linear quadratic regulator (LQR) design, can also be used to determine the feedback gain matrix that minimizes a quadratic cost function
Nonlinear Controller Implementation
- The designed state feedback controller for the linearized system is transformed back to the original nonlinear system using the inverse of the diffeomorphism obtained during input-state linearization
- The resulting nonlinear state feedback controller achieves the desired closed-loop performance for the original nonlinear system
- Robustness and performance trade-offs should be considered when designing state feedback controllers for input-state linearized systems
- The linearization is valid only in a neighborhood of the operating point