Self-tuning regulators (STRs) are adaptive control systems that automatically adjust controller parameters based on observed system behavior. They're a key part of adaptive control, helping systems handle unknown or changing parameters.
STRs use a parameter estimator and controller design block to update control strategies in real-time. This makes them great for applications with nonlinear dynamics, uncertainties, or disturbances, like process control and robotics.
Self-tuning Regulators: Concept and Structure
Basic Principles and Components of STRs
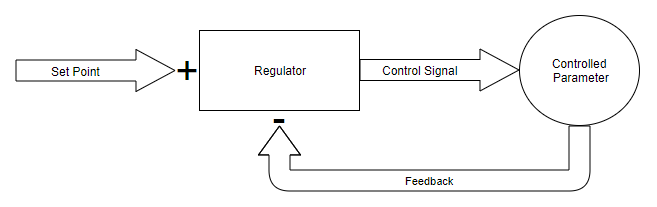
- Self-tuning regulators (STR) are adaptive control systems that automatically adjust controller parameters based on the observed behavior of the system being controlled
- The structure of an STR consists of two main components: a parameter estimator and a controller design block
- The parameter estimator recursively estimates the unknown system parameters using input-output data and an identification algorithm (recursive least squares (RLS), extended least squares (ELS))
- The controller design block computes the controller parameters based on the estimated system parameters and a chosen control strategy (minimum variance control, pole placement)
Advantages and Applications of STRs
- STRs can handle systems with unknown or time-varying parameters, making them suitable for applications where the system dynamics may change over time or are not fully known a priori
- STRs provide a flexible and adaptive approach to control system design, as they can automatically tune the controller parameters to maintain desired performance
- STRs have been successfully applied in various domains, including process control, robotics, automotive systems, and power systems
- The ability of STRs to adapt to changing system conditions makes them particularly useful in applications with nonlinear dynamics, parameter uncertainties, or external disturbances
STR Algorithms for System Classes
Minimum Variance STR
- Minimum variance STR aims to minimize the variance of the system output while ensuring stability and satisfying control constraints
- The minimum variance control law is derived by minimizing a cost function that penalizes the deviation of the output from its desired value
- The control law is expressed in terms of the estimated system parameters and can be updated recursively as new estimates become available
- Minimum variance STR is well-suited for systems with stochastic disturbances and can provide optimal control performance in terms of output variance minimization
Pole Placement STR
- Pole placement STR allows the designer to specify the desired closed-loop pole locations, which determine the system's dynamic response characteristics
- The pole placement control law is obtained by solving a system of linear equations that relate the desired pole locations to the controller parameters
- The controller parameters are updated based on the estimated system parameters to maintain the desired closed-loop behavior
- Pole placement STR enables the designer to shape the system response by placing the closed-loop poles at desired locations in the complex plane (dominant pole, settling time)
Other STR Algorithms
- Generalized minimum variance (GMV) STR incorporates control weighting and noise models to provide a more flexible control design framework
- Linear quadratic Gaussian (LQG) STR minimizes a quadratic cost function subject to Gaussian disturbances and provides optimal control in the presence of measurement noise and process disturbances
- Adaptive pole placement with sensitivity functions allows for the specification of desired closed-loop sensitivity functions in addition to pole locations
- Robust STR algorithms, such as dead-zone modifications and parameter projection, enhance the robustness of the control system against modeling errors and parameter uncertainties
Convergence and Robustness of STR Schemes
Convergence Analysis
- Convergence analysis of STR schemes involves studying the conditions under which the estimated parameters converge to their true values and the control performance approaches the desired behavior
- The convergence of the parameter estimator depends on factors such as the excitation condition, which ensures that the input signal is sufficiently rich to allow accurate parameter estimation
- The convergence of the controller design block depends on the stability and robustness of the chosen control strategy and its ability to handle estimation errors and system uncertainties
- Persistence of excitation and sufficient richness conditions are crucial for ensuring the convergence of STR schemes (input signal, frequency content)
Robustness Considerations
- Robustness analysis of STR schemes assesses their ability to maintain satisfactory performance in the presence of modeling errors, disturbances, and parameter variations
- Robust STR designs incorporate techniques such as dead-zone modifications, parameter projection, and adaptive control with guaranteed stability to enhance the robustness of the overall system
- Dead-zone modifications prevent excessive parameter adaptation in the presence of small estimation errors or noise
- Parameter projection ensures that the estimated parameters remain within a feasible region, preventing instability due to parameter drift
- Adaptive control with guaranteed stability utilizes Lyapunov-based techniques to ensure boundedness of the parameter estimates and closed-loop stability
Stability and Performance Guarantees
- Stability analysis of STR schemes involves deriving conditions that ensure the boundedness of the parameter estimates and the closed-loop system signals
- Lyapunov stability theory is commonly used to establish stability guarantees for STR schemes (Lyapunov function, negative definite derivative)
- Performance guarantees, such as bounded-input bounded-output (BIBO) stability and tracking error convergence, can be derived under certain assumptions on the system and the STR algorithm
- Robust stability margins, such as gain and phase margins, can be analyzed to assess the robustness of the STR scheme to modeling errors and parameter variations
STR Applications in Industrial Control
Application Process and Design Considerations
- When applying STR to a specific problem, the first step is to identify the system model structure and select an appropriate parameter estimation algorithm
- The control strategy is then chosen based on the desired performance objectives and the characteristics of the system being controlled
- Simulation studies and experimental validation are conducted to evaluate the performance of the STR scheme in terms of tracking accuracy, disturbance rejection, and robustness to uncertainties
- Practical considerations, such as sampling time, measurement noise, and actuator constraints, should be taken into account when designing and implementing STR schemes
Performance Evaluation and Comparative Analysis
- Performance metrics, such as the integral of absolute error (IAE), the integral of squared error (ISE), and the total variance, can be used to quantify the effectiveness of the STR scheme
- Comparison with other control approaches, such as fixed-gain controllers or model predictive control, can provide insights into the benefits and limitations of STR in the given application
- Robustness analysis, including Monte Carlo simulations and worst-case scenarios, helps assess the performance of the STR scheme under various operating conditions and uncertainties
- Real-time implementation aspects, such as computational complexity and memory requirements, should be considered when evaluating the feasibility of STR for a specific industrial control problem
Successful Industrial Applications
- STRs have been successfully applied in process control industries, such as chemical plants and oil refineries, for controlling variables like temperature, pressure, and flow rates
- In robotics, STRs have been used for adaptive motion control, force control, and trajectory tracking of robotic manipulators
- Automotive applications of STRs include adaptive cruise control, engine management systems, and active suspension control
- STRs have also been employed in power systems for adaptive voltage regulation, frequency control, and power quality improvement