Second-order differential equations are a key part of solving complex real-world problems. They help us model things like springs, pendulums, and electrical circuits, giving us insights into how these systems behave over time.
These equations are more complex than first-order ones, but they're super useful. We'll learn how to classify them, solve different types, and apply them to practical situations. It's like unlocking a new toolbox for tackling tricky math problems.
Classifying Second-Order Linear Differential Equations
Identifying Second-Order Linear Differential Equations
- A second-order linear differential equation has the form
- , , , and are continuous functions of
- for the equation to be second-order
- Examples of second-order linear differential equations:
Homogeneous and Nonhomogeneous Equations
- A second-order linear differential equation is homogeneous if
- Example:
- A second-order linear differential equation is nonhomogeneous if
- Example:
Constant-Coefficient and Variable-Coefficient Equations
- The coefficients , , and can be constant or variable
- Constant-coefficient equations have coefficients that are constants (, , )
- Example:
- Variable-coefficient equations have coefficients that are functions of
- Example:
- Constant-coefficient equations have coefficients that are constants (, , )
Standard Form of Second-Order Linear Differential Equations
- A second-order linear differential equation is in standard form when
- Example: is in standard form
- If , divide the equation by to obtain standard form
Solving Homogeneous Second-Order Linear Equations
General Solution of Homogeneous Equations
- The general solution of a homogeneous second-order linear differential equation with constant coefficients is
- and are linearly independent solutions
- and are arbitrary constants
- The characteristic equation of is
- The roots of the characteristic equation determine the form of the general solution
Real and Distinct Roots
- If the roots (, ) of the characteristic equation are real and distinct, the general solution is
- Example: For , the characteristic equation is
- The roots are and
- The general solution is
Real and Repeated Roots
- If the roots of the characteristic equation are real and repeated (), the general solution is
- Example: For , the characteristic equation is
- The repeated root is
- The general solution is
Complex Conjugate Roots
- If the roots of the characteristic equation are complex conjugates (), the general solution is
- Example: For , the characteristic equation is
- The complex conjugate roots are
- The general solution is
Wronskian and Linear Independence
- The Wronskian can determine if two solutions are linearly independent
- For solutions and , the Wronskian is
- If for some , then and are linearly independent
Finding Particular Solutions of Nonhomogeneous Equations
General Solution of Nonhomogeneous Equations
- The general solution of a nonhomogeneous second-order linear differential equation is the sum of:
- The general solution of the corresponding homogeneous equation (complementary solution)
- A particular solution of the nonhomogeneous equation
- Example: For , the general solution is
- is the complementary solution
- is a particular solution

Method of Undetermined Coefficients
- The method of undetermined coefficients finds a particular solution when is a polynomial, exponential, sine, cosine, or a combination of these functions
- Assume a particular solution with unknown coefficients based on the form of
- Example: For , assume
- Substitute the assumed solution into the differential equation and solve for the unknown coefficients
- For , substituting yields
- The particular solution is
Method of Variation of Parameters
- The method of variation of parameters finds a particular solution for any continuous
- Let and be linearly independent solutions of the corresponding homogeneous equation
- A particular solution is given by , where:
- is the Wronskian of and
Superposition Principle
- The superposition principle states that if:
- is a solution to
- is a solution to
- Then is a solution to
- This principle allows for breaking down complex nonhomogeneous terms into simpler components
Applications of Second-Order Differential Equations
Modeling Simple Harmonic Motion
- Second-order differential equations can model simple harmonic motion
- Examples include mass-spring systems and pendulums
- The acceleration is proportional to the displacement
- The equation of motion for a simple harmonic oscillator is
- is mass, is the damping coefficient, is the spring constant
- is the external force
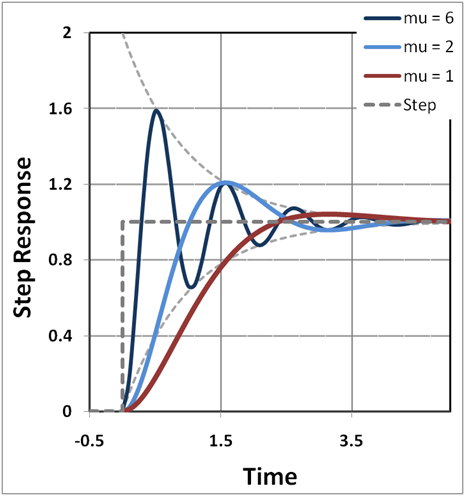
Characterizing Oscillator Behavior
- The natural frequency and the damping ratio characterize the oscillator's behavior
- and
- The system is underdamped if , critically damped if , and overdamped if
- Underdamped systems exhibit oscillatory behavior with decreasing amplitude
- Critically damped systems return to equilibrium as quickly as possible without oscillating
- Overdamped systems return to equilibrium slowly without oscillating
Other Physical Applications
- Second-order differential equations can model various physical phenomena
- Example: RLC circuits, where the current satisfies a second-order differential equation
- Resonance occurs when the external force frequency matches the system's natural frequency
- This leads to large-amplitude oscillations
- Example: A resonant frequency can cause a bridge to oscillate dangerously