Sampling-based and optimization-based planning methods are two key approaches in robotics. Sampling methods randomly explore the configuration space, building graphs or trees without explicit obstacle representation. Optimization methods formulate planning as a mathematical problem, finding optimal solutions with explicit obstacle representation.
Sampling-based methods like PRMs and RRTs are probabilistically complete and efficient in high-dimensional spaces. Optimization-based methods, including gradient descent and convex optimization, produce smooth, optimal trajectories and easily incorporate dynamic constraints. Each approach has unique strengths and limitations in robotic path planning.
Sampling-Based and Optimization-Based Planning Methods
Sampling vs optimization planning methods
- Sampling-based methods randomly explore configuration space building graph or tree structures without explicit obstacle representation (PRMs, RRTs)
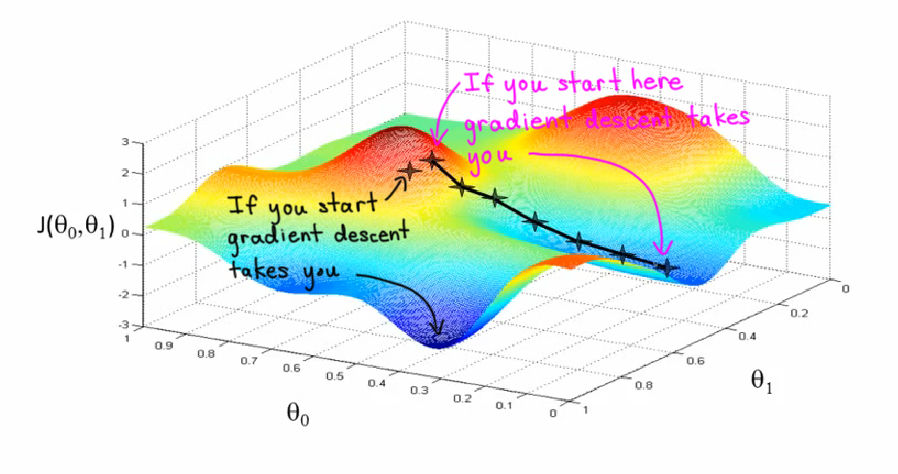
- Optimization-based methods formulate planning as mathematical optimization problem finding optimal solutions often requiring explicit obstacle representation (gradient descent, convex optimization)
![Sampling vs optimization planning methods, Gradient Descent [The Hundred-Page Machine Learning Book]](https://storage.googleapis.com/static.prod.fiveable.me/search-images%2F%22Sampling_vs_optimization_planning_methods_in_robotics%3A_PRMs_RRTs_gradient_descent_convex_optimization%22-fetch.php%3Fw%3D400%26tok%3D634382%26media%3Dgradient_descent.png)
Principles of sampling-based planning
- Probabilistic Roadmaps (PRM)
- Sampling phase randomly generates free space configurations connecting nearby ones with local planners
- Query phase connects start and goal to roadmap searching for path using graph algorithms (A*, Dijkstra's)
- Rapidly-exploring Random Trees (RRT)
- Incremental tree growth starts from initial configuration iteratively expanding towards random samples
- Biased exploration tends to explore large unexplored areas efficiently
- Variants include RRT-Connect growing trees from both start and goal and RRT* providing asymptotic optimality
Concepts in optimization-based planning
- Gradient descent iteratively optimizes by following negative gradient of objective function for local optimization
- Convex optimization solves problems with convex objective function and constraints guaranteeing global optimum if exists
- Trajectory optimization represents path as waypoint sequence minimizing cost function (smoothness, obstacle avoidance)
- Model Predictive Control (MPC) uses receding horizon planning optimizing short time horizons executing first control input then replanning
Comparison of planning method applications
- Sampling-based advantages
- Probabilistically complete ensuring solution if one exists
- Efficient in high-dimensional spaces (robotic arms, multi-robot systems)
- Handle complex geometric constraints well (narrow passages, cluttered environments)
- Sampling-based limitations
- May produce non-optimal paths requiring post-processing
- Performance degrades in narrow passages needing specialized sampling strategies
- Difficulty incorporating dynamic constraints (velocity limits, acceleration bounds)
- Optimization-based advantages
- Produce smooth optimal trajectories considering multiple objectives
- Easily incorporate dynamic constraints (joint limits, energy consumption)
- Handle time-varying objectives and constraints (moving obstacles, changing goals)
- Optimization-based limitations
- May get stuck in local optima requiring multiple initializations
- Computationally expensive for complex problems with many variables
- Sensitive to initial conditions affecting solution quality