Step functions and discontinuous forcing functions are game-changers in differential equations. They let us model sudden changes, like flipping a switch or applying a force out of nowhere. It's like adding a plot twist to our math story!
Laplace transforms make dealing with these jumpy functions a breeze. We can turn tricky discontinuous problems into smooth algebraic ones. It's like having a secret weapon for solving real-world problems with sudden changes.
Step Functions
Heaviside Step Function and Unit Step Function
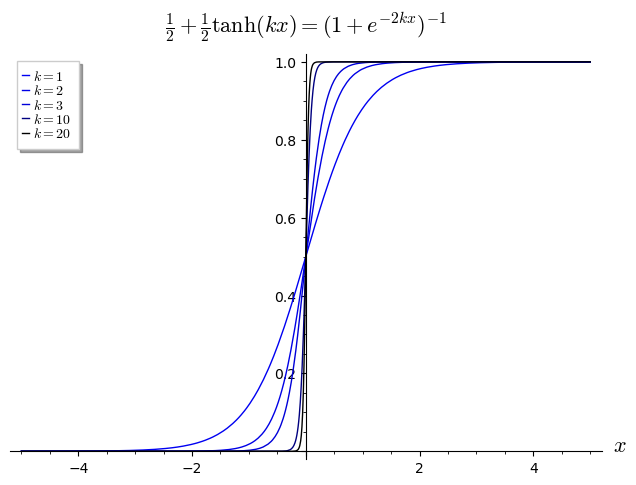
- Heaviside step function represents a discontinuous function that jumps from 0 to 1 at
- Defined as for and for
- Useful for modeling sudden changes or switches in a system (turning on a light switch)
- Unit step function is a shifted version of the Heaviside step function
- Defined as for and for
- Can be expressed in terms of the Heaviside step function:
- Represents a unit change in a system at a specific time (applying a constant force at a given moment)
Piecewise Continuous Functions and Laplace Transforms
- Piecewise continuous functions are functions that are continuous on a finite number of intervals but may have discontinuities at the endpoints of these intervals
- Can be represented using step functions (Heaviside or unit step) to define different pieces of the function
- Example: can be written as
- Laplace transform of step functions allows for solving differential equations with discontinuous forcing functions
- Laplace transform of the Heaviside step function:
- Laplace transform of the unit step function:
- Laplace transform of a shifted unit step function: , where is the shift amount

Discontinuous Forcing Functions
Discontinuous Forcing Functions and Dirac Delta Function
- Discontinuous forcing functions are functions that have sudden changes or jumps in their values
- Can be represented using step functions (Heaviside or unit step) or the Dirac delta function
- Example: a sudden impact force on a spring-mass system can be modeled using a step function or Dirac delta function
- Dirac delta function is a generalized function that represents an infinitely high, infinitely narrow spike at
- Defined by its integral properties: and
- Useful for modeling instantaneous changes or impulses in a system (a sharp blow to a structure)
- Laplace transform of the Dirac delta function:
Switching Circuits and Applications
- Switching circuits are electrical circuits that can be modeled using discontinuous forcing functions
- Example: a simple RC circuit with a switch that is closed at can be modeled using a unit step function as the input voltage
- The resulting current and voltage across the capacitor can be found using Laplace transforms and step function properties
- Other applications of discontinuous forcing functions and step functions include:
- Control systems (modeling sudden changes in input or disturbances)
- Signal processing (representing pulses or square waves)
- Mechanical systems (modeling impact forces or sudden changes in applied forces)