Neural networks and fuzzy logic are powerful tools in adaptive control. These techniques mimic human learning and reasoning, allowing control systems to adapt to changing conditions and uncertainties in real-time.
Implementing neural networks and fuzzy logic in adaptive control involves designing controllers, ensuring stability, and analyzing convergence. These methods enable robust control in complex systems like robotics, aircraft, and chemical plants, offering improved performance over traditional approaches.
Neural Networks and Fuzzy Logic in Adaptive Control
Fundamentals of neural networks and fuzzy logic
- Neural Networks
- Artificial neurons mimic biological neurons process information
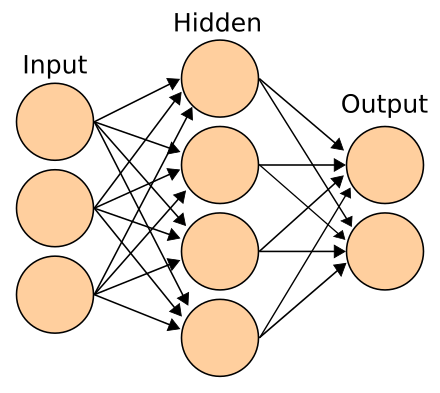
- Network architectures organize neurons
- Feedforward networks propagate data in one direction (input to output)
- Recurrent networks allow feedback connections (memory capabilities)
- Activation functions introduce non-linearity (sigmoid, ReLU)
- Learning algorithms adjust network parameters
- Backpropagation calculates gradients efficiently
- Gradient descent optimizes network weights iteratively
- Fuzzy Logic Systems
- Fuzzy sets extend classical set theory with partial membership
- Membership functions quantify degree of belonging to a set
- Fuzzy rules capture expert knowledge in if-then format
- Fuzzification converts crisp inputs to fuzzy values, defuzzification reverses process
- Adaptive Control Integration
- System identification builds dynamic models from input-output data
- Online learning updates model parameters in real-time
- Parameter estimation infers system characteristics from observations

Design of neural network-based controllers
- Nonlinear system modeling captures complex dynamics
- State-space representation describes system evolution
- Input-output mapping relates system inputs to outputs
- Controller architectures define adaptation mechanism
- Direct adaptive control adjusts controller parameters directly
- Indirect adaptive control updates plant model then synthesizes controller
- Learning algorithms for control optimize performance
- Online weight adjustment tunes network parameters in real-time
- Error backpropagation through time handles temporal dependencies
- Stability considerations ensure safe operation
- Lyapunov stability analysis guarantees bounded signals
- Persistency of excitation ensures parameter convergence
Fuzzy logic for adaptive control
- Handling uncertainties improves robustness
- Linguistic variable representation captures human expertise
- Rule-based inference mimics human decision-making
- Adaptive fuzzy systems learn from data
- Self-organizing fuzzy controllers modify rule structure
- Neuro-fuzzy systems combine neural and fuzzy approaches (ANFIS)
- Fuzzy gain scheduling adapts controller gains based on operating conditions
- Fuzzy model reference adaptive control tracks desired behavior
- Robustness to disturbances and parameter variations enhances performance
Convergence and stability analysis
- Lyapunov stability theory proves system stability
- Barbalat's lemma establishes asymptotic properties
- Convergence analysis examines long-term behavior
- Parameter convergence ensures accurate estimation
- Tracking error convergence guarantees control objectives
- Robustness analysis quantifies disturbance rejection
- Input-to-state stability bounds state response
- stability limits energy of output signals
- Stability of fuzzy systems ensures safe operation
- Parallel distributed compensation stabilizes local models
- Linear matrix inequalities formulate stability conditions
Implementation of adaptive control algorithms
- Simulation environments facilitate design and testing
- MATLAB/Simulink provides comprehensive toolboxes
- Python with control libraries offers flexibility (control, slycot)
- Real-time implementation considerations ensure practical deployment
- Sampling rate affects control performance
- Computational efficiency enables faster execution
- Case studies demonstrate practical applications
- Robot manipulator control improves precision
- Aircraft control systems enhance maneuverability
- Process control in chemical plants optimizes production
- Performance evaluation assesses controller effectiveness
- Tracking error measures deviation from desired behavior
- Convergence rate indicates adaptation speed
- Robustness to disturbances quantifies rejection capabilities
- Comparative analysis guides controller selection
- Neural network vs fuzzy logic approaches trade off interpretability and accuracy
- Adaptive vs non-adaptive control strategies balance complexity and performance