Tangent spaces are crucial for understanding the local geometry of algebraic varieties. They provide a linear approximation of the variety at a point, helping us analyze smoothness and detect singularities. This concept is fundamental in algebraic geometry.
The Jacobian criterion is a powerful tool for detecting and classifying singularities. By examining the rank of the Jacobian matrix, we can determine whether a point is smooth or singular, shedding light on the variety's local structure and overall geometry.
Tangent spaces on varieties
Computing tangent spaces
- The tangent space at a point P on an algebraic variety V is the vector space of all tangent vectors to V at P
- For an affine variety V defined by polynomials in variables, the tangent space at a point P is the kernel of the Jacobian matrix evaluated at P
- The Jacobian matrix contains the partial derivatives of the defining polynomials with respect to each variable
- The kernel of the Jacobian matrix represents the directions in which the variety is "flat" or has zero curvature at P
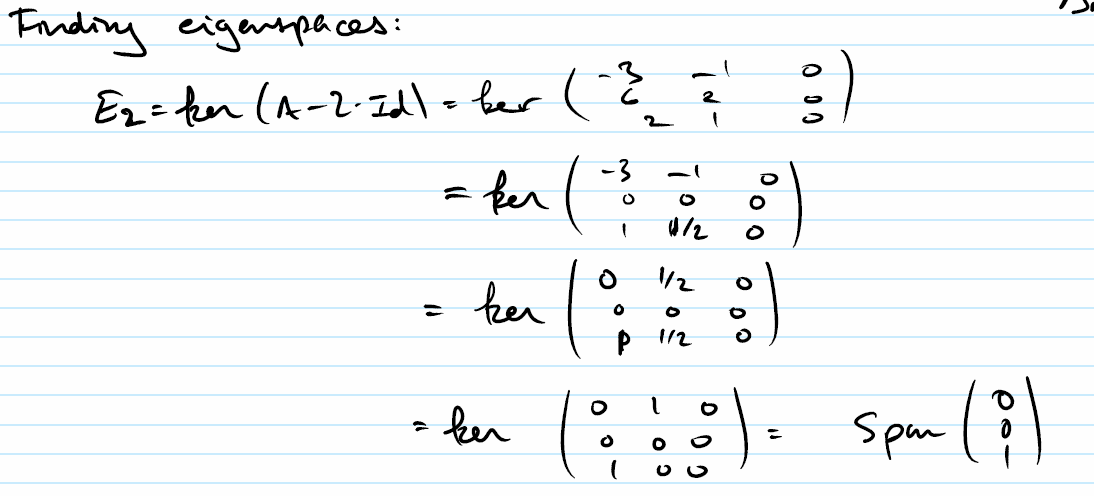
- The tangent space can be computed by finding the nullspace of the Jacobian matrix using techniques from linear algebra, such as Gaussian elimination or singular value decomposition
Properties of tangent spaces
- The dimension of the tangent space at a smooth point is equal to the dimension of the variety
- A smooth point is a point where the variety is locally a manifold, without any singularities or self-intersections
- For a projective variety, the tangent space is defined in the same way, but using homogeneous coordinates
- Homogeneous coordinates allow the representation of points at infinity and provide a consistent framework for studying projective varieties
- The tangent space provides a linear approximation to the variety near the point P, which is useful for studying the local geometry and singularities of the variety
Singularity detection with the Jacobian
Jacobian criterion for singularities
- A point P on an algebraic variety V is singular if the dimension of the tangent space at P is greater than the dimension of V
- Singular points are points where the variety is not locally a manifold, such as self-intersections, cusps, or double points
- The Jacobian criterion states that a point P on an affine variety V defined by polynomials is singular if and only if the rank of the Jacobian matrix evaluated at P is less than the codimension of V ()
- The codimension of V is the difference between the ambient space dimension and the dimension of the variety
- For a hypersurface defined by a single polynomial , a point P is singular if and only if all partial derivatives of vanish at P
- A hypersurface is a variety of codimension 1, such as a curve in a plane or a surface in 3-dimensional space
Classifying singularities
- The Jacobian criterion can be used to classify the types of singularities, such as nodes, cusps, and double points, based on the rank of the Jacobian matrix and the local geometry of the variety near the singular point
- A node is a singular point where two branches of the variety intersect transversely (example: the origin of the curve )
- A cusp is a singular point where two branches of the variety meet tangentially (example: the origin of the curve )
- A double point is a singular point where the variety intersects itself with multiplicity 2 (example: the origin of the curve )
- The classification of singularities helps understand the local structure of the variety and is important in the study of resolution of singularities and the geometry of algebraic curves and surfaces
Jacobian matrix: Geometry and rank
Geometric interpretation of the Jacobian matrix
- The Jacobian matrix encodes the first-order approximation of the algebraic variety V defined by polynomials near a point P
- The first-order approximation is the linear part of the Taylor expansion of the defining polynomials at the point P
- The kernel of the Jacobian matrix at a point P corresponds to the directions in which the variety is "flat" or has zero curvature at P
- These directions form the tangent space to the variety at P
- The image of the Jacobian matrix at a point P corresponds to the directions in which the variety is "curved" or has non-zero curvature at P
- These directions are orthogonal to the tangent space and indicate how the variety bends or twists near P
Rank of the Jacobian matrix and local geometry
- The rank of the Jacobian matrix at a point P determines the dimension of the tangent space and the local geometry of the variety near P
- The rank is the number of linearly independent rows or columns of the Jacobian matrix
- If the rank of the Jacobian matrix is equal to the codimension of V, then the point P is a smooth point, and the variety is locally a manifold near P
- At a smooth point, the tangent space has the same dimension as the variety, and the variety has no singularities or self-intersections
- If the rank of the Jacobian matrix is less than the codimension of V, then the point P is a singular point, and the variety has a more complicated local structure, such as self-intersections or cusps
- At a singular point, the tangent space has a higher dimension than the variety, indicating the presence of multiple tangent directions or a degenerate structure
- The rank of the Jacobian matrix can be computed using techniques from linear algebra, such as Gaussian elimination or singular value decomposition, and provides crucial information about the singularities and the local geometry of the variety