➗Linear Algebra and Differential Equations Unit 12 Review
12.2 Runge-Kutta Methods
12.2 Runge-Kutta Methods
Unit & Topic Study Guides
Linear Systems and Matrices
Determinants
Vector Spaces
Linear Transformations
Eigenvalues and Eigenvectors
Inner Products and Orthogonality
Intro to Differential Equations
First-Order Differential Equations
Higher-Order Linear Differential Equations
Systems of Differential Equations
Laplace Transforms
Numerical Methods for ODEs
Linear Algebra & DE: Real-World Applications
Runge-Kutta methods are powerful tools for solving differential equations numerically. They offer a balance between accuracy and computational efficiency, making them essential for tackling complex problems in science and engineering.
These methods use weighted sums of increments to approximate solutions, with higher-order methods providing better accuracy. From the basic fourth-order RK4 to advanced adaptive techniques, Runge-Kutta methods are versatile and widely applicable in various fields.
Runge-Kutta Methods for IVPs
Fundamentals of Runge-Kutta Methods
- Runge-Kutta methods approximate solutions of ordinary differential equations (ODEs) with given initial conditions
- General form involves weighted sum of increments, each increment calculated as product of step size and estimated solution slope
- Derived by matching Taylor series expansion of true solution with numerical approximation up to certain order of accuracy
- Order of method determines local truncation error and relates to number of function evaluations per step
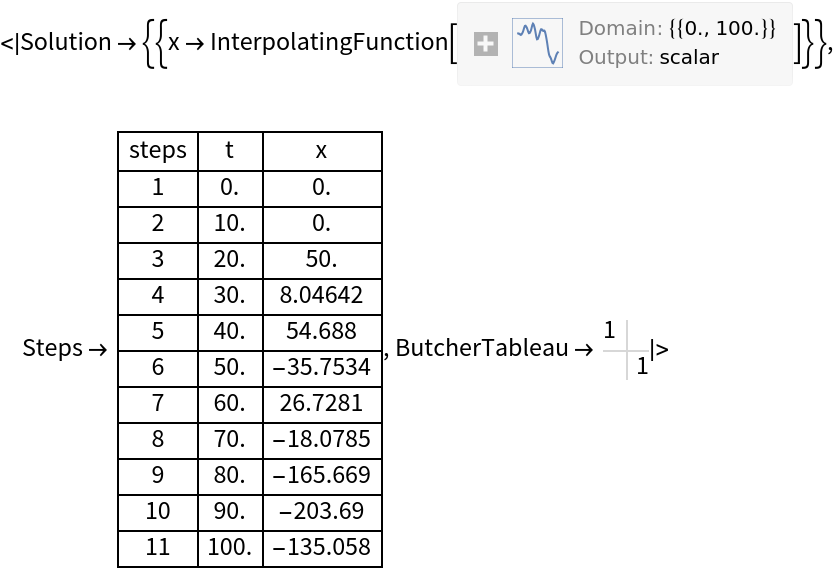
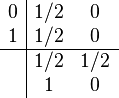
- Butcher tableaus display coefficients and weights used in method (compact representation)
- Explicit methods calculate solution at next time step using only known values
- Implicit methods require solving system of equations at each step
- Apply to systems of ODEs by treating each equation separately and using vector arithmetic
Types and Applications of Runge-Kutta Methods
- Explicit Runge-Kutta methods suitable for non-stiff problems (faster computation)
- Implicit Runge-Kutta methods preferred for stiff problems (better stability properties)
- Symplectic Runge-Kutta methods designed for Hamiltonian systems (preserve important physical properties)
- Embedded Runge-Kutta pairs (Dormand-Prince methods) offer efficient error estimation and adaptive step size control
- Application in various fields (physics, engineering, biology)
- Modeling planetary motion
- Simulating chemical reactions
- Predicting population dynamics
Implementing Fourth-Order Runge-Kutta
RK4 Method Structure
- Fourth-order Runge-Kutta method (RK4) balances accuracy and computational efficiency
- Requires four function evaluations per step to achieve fourth-order accuracy
- Calculates four increments (k1, k2, k3, k4) at different points within each step to estimate solution slope
- Updates solution using weighted average of increments:
- Step size selection crucial for balancing accuracy and computational cost
- Adaptive step size techniques automatically adjust step size based on estimated local truncation error
- Applies component-wise to each equation when solving systems of ODEs
RK4 Implementation Considerations
- Choose appropriate initial conditions and step size
- Implement function to evaluate right-hand side of ODE
- Calculate k1, k2, k3, and k4 incrementally within each step
- Update solution using weighted average formula
- Consider error tolerance for adaptive step size methods
- Implement vector operations for systems of ODEs
- Test method on well-known problems with analytical solutions (harmonic oscillator, exponential growth)
Truncation Errors in Runge-Kutta
Local Truncation Error Analysis
- Local truncation error (LTE) introduced in single step of method, assuming all previous values exact
- For s-stage Runge-Kutta method of order p, LTE expressed as , where h represents step size
- Estimate LTE using embedded Runge-Kutta pairs
- Richardson extrapolation applied to approximate and reduce local errors
- LTE analysis helps determine appropriate step size for desired accuracy
- Examples of LTE estimation
- Compare RK4 solution with Taylor series expansion
- Use embedded Runge-Kutta pair (RK45) to estimate error
Global Truncation Error Analysis
- Global truncation error (GTE) accumulates over all steps from initial point to final solution
- Relationship between local and global truncation errors typically for method of order p
- Stability analysis studies how errors propagate and potentially amplify over multiple steps
- Richardson extrapolation used to estimate and reduce global errors
- GTE analysis crucial for assessing long-term accuracy of numerical solution
- Examples of GTE analysis
- Compare numerical solution with known analytical solution over entire interval
- Use multiple runs with different step sizes to estimate convergence rate
Efficiency vs Accuracy of Runge-Kutta Methods
Efficiency Metrics
- Efficiency measured by number of function evaluations required per step relative to order of accuracy
- Higher-order methods achieve better accuracy for given step size but require more function evaluations
- Concept of "effective order" compares accuracy achieved by different methods for fixed computational cost
- Explicit methods generally more efficient for non-stiff problems
- Implicit methods preferred for stiff problems due to stability properties
- Embedded Runge-Kutta pairs offer efficient error estimation and adaptive step size control
- Examples of efficiency comparisons
- Compare RK4 with Euler method for solving predator-prey model
- Analyze computational cost of implicit vs explicit methods for stiff chemical kinetics problem
Selecting Appropriate Runge-Kutta Methods
- Choice depends on specific problem characteristics, desired accuracy, and available computational resources
- Consider stiffness of ODE system when selecting between explicit and implicit methods
- Evaluate trade-off between accuracy and computational cost for different order methods
- Assess importance of preserving specific physical properties (energy conservation, symplecticity)
- Consider adaptive step size methods for problems with varying timescales
- Examples of method selection
- Choose symplectic method for long-term simulation of planetary orbits
- Select adaptive Runge-Kutta method for solving chemical reaction system with widely varying reaction rates