Vector algebra is a powerful tool for analyzing motion and forces in physics. It allows us to combine and manipulate quantities with both magnitude and direction, like velocity and acceleration, using simple mathematical operations.
Understanding vector algebra is crucial for solving complex physics problems. By breaking vectors into components and using unit vectors, we can easily add, subtract, and multiply vectors to find resultant forces, displacements, and other important physical quantities.
Vector Algebra
Vector algebra for resultant vectors
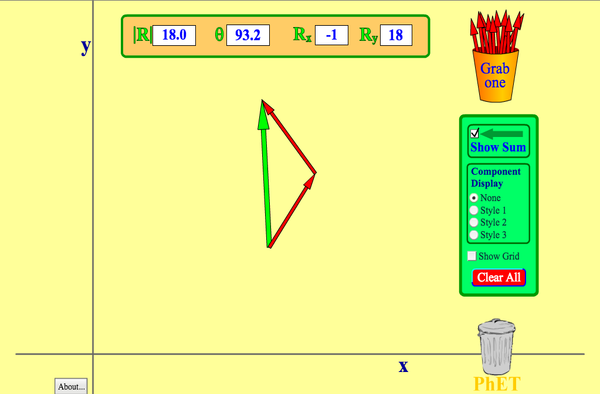
- Vector addition combines two or more vectors to produce a resultant vector
- Graphical method places the tail of one vector at the head of the other, then draws the resultant from the tail of the first to the head of the last (tip-to-tail method)
- Analytical method adds the components of the vectors using the formula
- Vector subtraction finds the difference between two vectors
- Graphical method places the tail of the second vector at the head of the first, then draws the resultant from the tail of the first to the tail of the second
- Analytical method subtracts the components of the vectors using the formula
- Scalar multiplication multiplies each component of the vector by a scalar value using the formula
- Unknown vectors can be solved for by equating the components of the vectors and solving for the unknown variables in the resulting system of equations
Vector expressions in physical situations
- Displacement represents the change in position of an object, expressed as a vector from the initial to the final position (distance and direction)
- Velocity describes the rate of change of position, represented by a vector pointing in the direction of motion
- Average velocity is calculated using the formula , where is the displacement and is the time interval
- Acceleration represents the rate of change of velocity, expressed as a vector in the direction of the change in velocity
- Average acceleration is calculated using the formula , where is the change in velocity and is the time interval
- Force is a push or pull acting on an object, represented by a vector pointing in the direction of the applied force (Newton's laws of motion)
- Vector fields describe physical quantities that vary in space, such as electric or magnetic fields

Unit vectors in three-dimensional space
- Unit vectors have a magnitude of 1 and are used to specify direction in three-dimensional space
- Standard unit vectors are (along x-axis), (along y-axis), and (along z-axis)
- Vectors can be expressed using unit vectors and their scalar components:
- , , and represent the scalar components of the vector along the x, y, and z axes, respectively (magnitude in each direction)
- Unit vectors in a given direction can be found by normalizing the vector, which involves dividing it by its magnitude using the formula
- The resulting vector has a magnitude of 1 and points in the same direction as the original vector (directional information preserved)
Vector operations and applications
- Vector dot product (scalar product) measures the alignment of two vectors and is calculated as
- Vector cross product results in a vector perpendicular to both input vectors, useful in describing rotational motion and torque
- Vector calculus extends vector algebra to include differentiation and integration of vector-valued functions
- Vector spaces are mathematical structures that generalize the properties of vectors in physics and linear algebra