Neural interfaces for prosthetic control bridge the gap between the brain and artificial limbs. These systems capture neural signals, process them, and translate them into commands for prosthetic devices, enabling more natural and intuitive control for users.
Challenges in this field include improving signal quality, developing advanced decoding algorithms, and ensuring long-term stability of implanted devices. Future advancements focus on integrating sensory feedback and creating bi-directional interfaces for enhanced prosthetic functionality.
Neural Signal Acquisition and Processing
Principles of Neural Signals
- Neural signals consist of electrical impulses generated by neurons in the brain and nervous system
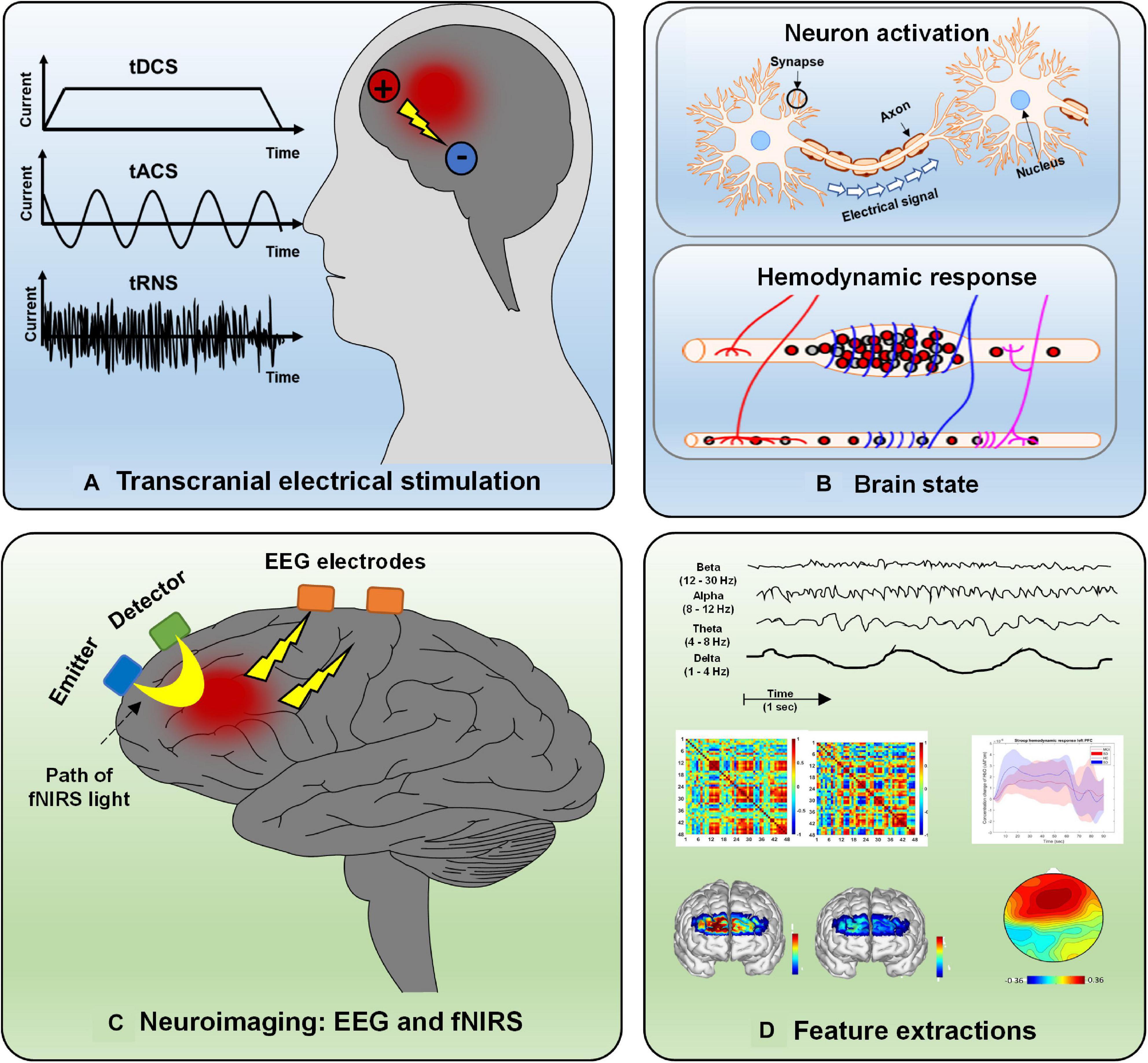
- Electrophysiological recording techniques capture neural signals from different brain regions
- Electroencephalography (EEG) records signals from the scalp
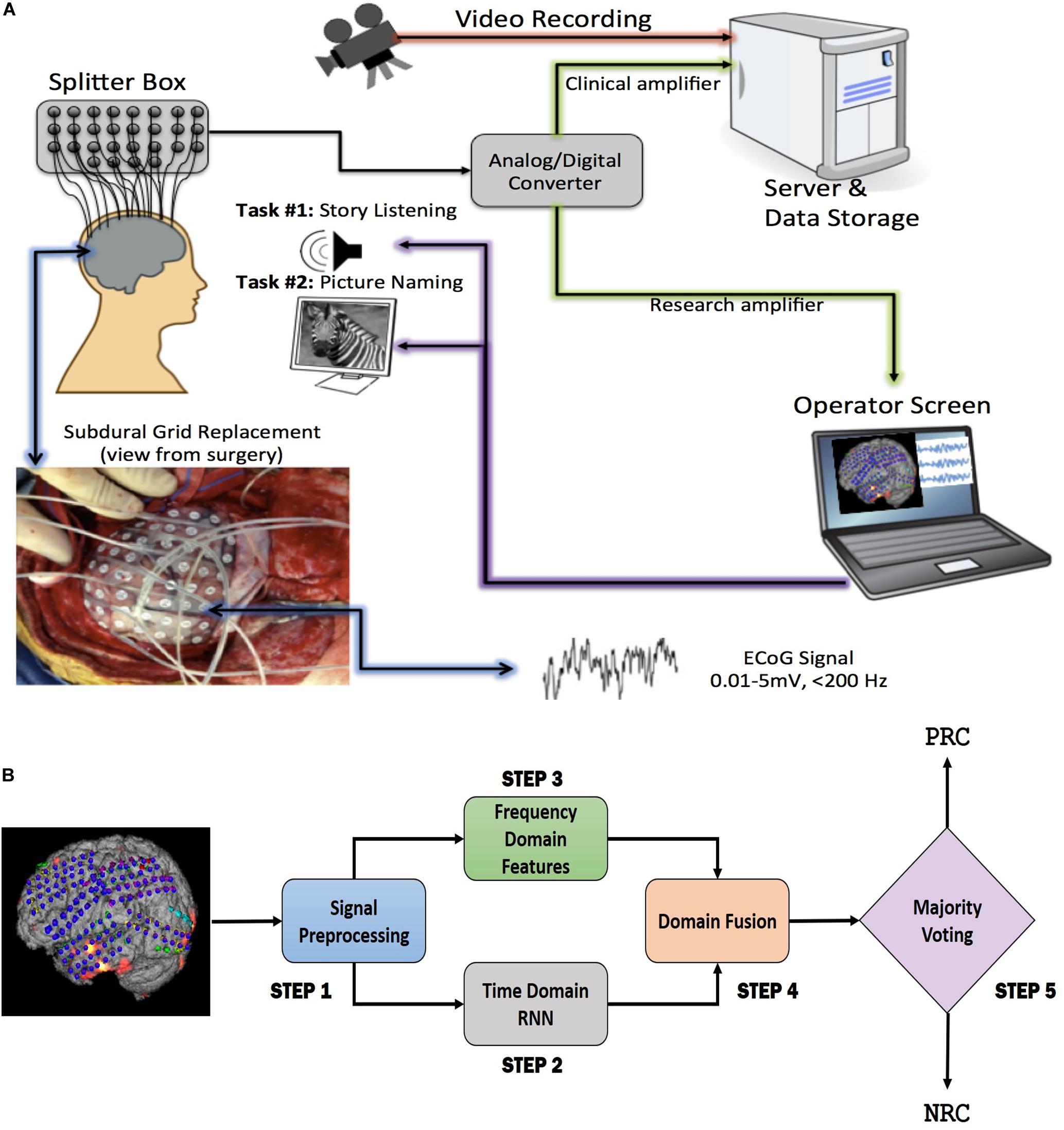
- Electrocorticography (ECoG) records signals directly from the brain surface
- Signal processing algorithms extract meaningful information from raw neural signals
- Filtering removes noise and artifacts
- Feature extraction identifies relevant signal characteristics
- Pattern recognition classifies signal patterns
Decoding and Machine Learning
- Machine learning techniques decode neural signals and map them to prosthetic movements
- Neural networks model complex relationships between signals and movements
- Support vector machines classify signals into distinct movement categories
- Real-time processing and decoding enable responsive prosthetic control
- Efficient computational methods minimize latency
- Specialized hardware (field-programmable gate arrays) accelerates processing
- Adaptive algorithms account for neural signal changes over time
- Continuous recalibration maintains consistent performance
- Online learning adjusts decoding models during use
Invasive vs Non-invasive Interfaces
Invasive Neural Interfaces
- Involve implantation of electrodes directly into brain or peripheral nervous system
- Offer higher spatial and temporal resolution compared to non-invasive methods
- Intracortical microelectrode arrays record from individual neurons
- Epidermal electrode grids cover larger brain areas
- Can target specific neural populations for precise prosthetic control
- Prone to long-term complications
- Tissue damage from electrode presence
- Immune responses to foreign materials
Non-invasive Neural Interfaces
- Record signals from outside the body without surgical intervention
- Safer and more accessible than invasive methods
- Provide lower signal quality and spatial resolution
- Technologies include EEG and functional near-infrared spectroscopy (fNIRS)
- Suitable for long-term use without surgical risks
- Limited ability to target specific neural populations
Comparison and Hybrid Approaches
- Choice between invasive and non-invasive depends on multiple factors
- Required signal quality for the application
- User preferences and acceptance of surgical procedures
- Specific prosthetic device requirements
- Hybrid systems combine invasive and non-invasive technologies
- Leverage advantages of both approaches
- Example: Invasive electrodes for motor control, non-invasive sensors for additional input
Challenges in Neural Interface Development
Biocompatibility and Stability
- Long-term stability of implanted electrodes remains a significant challenge
- Advanced materials and coating technologies improve biocompatibility
- Anti-inflammatory coatings reduce tissue response
- Flexible electrode materials minimize mechanical stress
- Improving signal-to-noise ratio enhances recording accuracy
- Advanced amplification circuits reduce electrical noise
- Signal processing algorithms filter out artifacts (muscle activity, eye movements)
Technical and Computational Challenges
- Developing sophisticated decoding algorithms for complex neural signals
- Deep learning models interpret high-dimensional neural data
- Reinforcement learning adapts to user intentions over time
- Miniaturization of neural interface hardware improves portability
- Microelectromechanical systems (MEMS) reduce device size
- Low-power electronics extend battery life
- Wireless data transmission enables seamless integration with prosthetics
- Bluetooth Low Energy protocols balance range and power consumption
- Encryption methods ensure data security and privacy
Ethical and Future Considerations
- Addressing ethical concerns in neural interface development
- Data ownership and privacy protection
- Potential for cognitive enhancement raises equality issues
- Future directions focus on bi-directional neural interfaces
- Simultaneous recording of neural signals and sensory feedback
- Closed-loop systems mimic natural sensorimotor integration
Sensory Feedback for Prosthetic Control
Types of Sensory Feedback
- Proprioception provides sense of limb position and movement
- Joint angle sensors in prosthetic limbs detect position
- Muscle tension sensors simulate natural proprioceptive input
- Tactile feedback enhances interaction with objects
- Pressure sensors on prosthetic fingertips detect contact force
- Texture sensors distinguish surface characteristics (rough, smooth)
Feedback Implementation Techniques
- Sensory substitution conveys information through alternative channels
- Vibrotactile stimulation uses skin vibrations to represent touch
- Electrotactile stimulation applies small electrical currents to skin
- Direct neural stimulation targets sensory pathways
- Peripheral nerve stimulation activates remaining nerve fibers
- Somatosensory cortex stimulation bypasses damaged nerves
- Closing the sensory-motor loop improves prosthetic control
- Real-time feedback allows for precise grip force modulation
- Enhanced embodiment increases user acceptance of the prosthetic
Challenges and Future Developments
- Developing high-resolution stimulation techniques for natural sensations
- Microelectrode arrays target individual sensory neurons
- Optogenetic stimulation offers cell-type specificity
- Integrating feedback seamlessly with motor control systems
- Synchronized sensory input with intended movements
- Adaptive feedback intensity based on task requirements
- Overcoming sensory adaptation to maintain long-term effectiveness
- Varying stimulation patterns prevent neural habituation
- Personalized calibration accounts for individual differences in perception