Steepest descent is a fundamental optimization method that moves towards the minimum of a function by following the negative gradient. It's simple yet powerful, making it a cornerstone of many optimization algorithms used in machine learning and other fields.
While steepest descent can be effective, it has limitations. It may converge slowly for ill-conditioned problems and struggle with saddle points. Understanding its strengths and weaknesses is crucial for applying it effectively and knowing when to use more advanced gradient-based methods.
Steepest Descent Optimization
Concept and Motivation
- Steepest descent method iteratively finds local minima of differentiable functions
- Moves in direction of negative gradient representing steepest descent at each point
- Updates current solution by taking steps proportional to negative gradient
- Useful for unconstrained optimization problems with continuous, differentiable objective functions
- Simplicity and low computational cost per iteration make it attractive for large-scale problems
- Applies to both convex and non-convex optimization problems (may converge to local minima in non-convex cases)
- Assumes moving in direction of steepest descent leads to function minimum
Applications and Considerations
- Particularly effective for quadratic or nearly quadratic objective functions
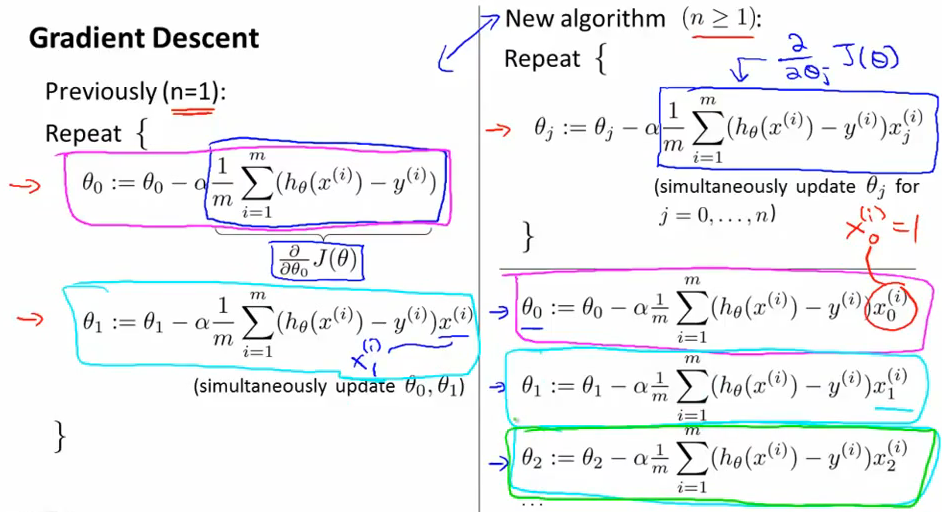
- Widely used in machine learning for training neural networks (backpropagation)
- Applied in image processing for denoising and image reconstruction
- Utilized in control systems for parameter optimization
- Employed in financial modeling for portfolio optimization
- Considerations when using steepest descent
- Function landscape (convexity, smoothness)
- Problem dimensionality
- Computational resources available
- Required accuracy of solution
Implementing Steepest Descent
Algorithm Components
- Compute gradient of objective function at each iteration
- Select initial starting point (random initialization or domain-specific heuristics)
- Specify stopping criterion (maximum iterations or change in function value tolerance)
- Determine step size (learning rate) affecting convergence
- Fixed step sizes (simple but may lead to slow convergence)
- Adaptive step size methods (line search, trust region strategies)
- Basic update rule
- current point
- step size
- gradient at
Implementation Techniques
- Approximate gradients using numerical techniques (finite difference methods)
- Include safeguards against numerical instabilities
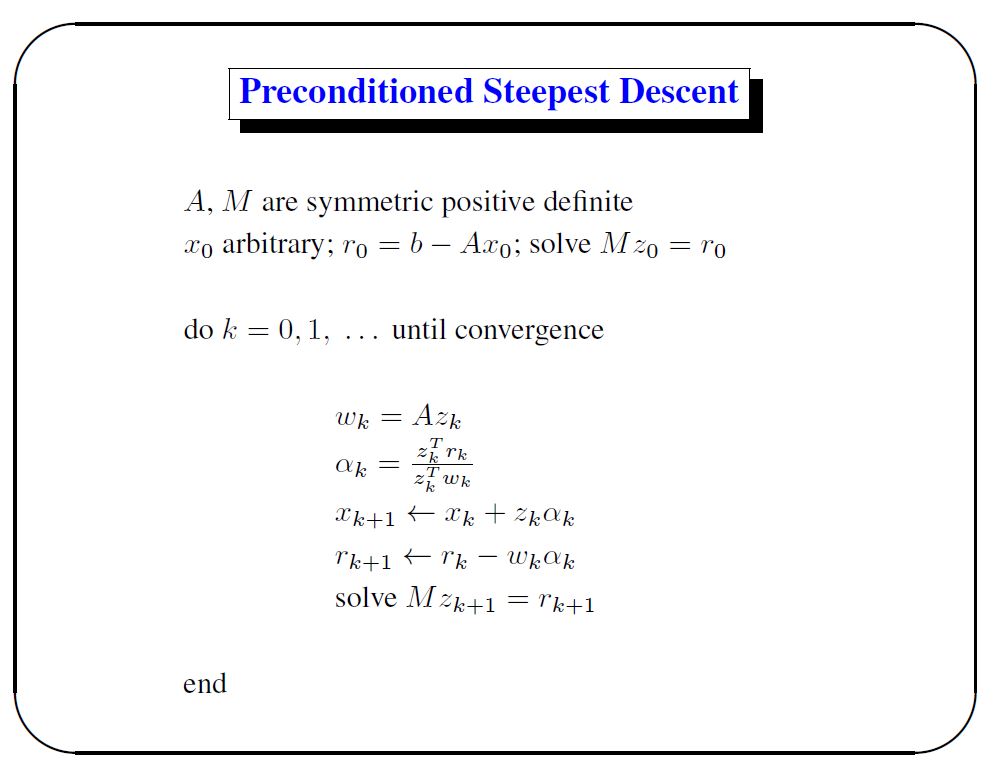
- Handle ill-conditioned problems (preconditioning, regularization)
- Use vectorized implementations for high-dimensional problems
- Implement backtracking line search for adaptive step size
- Start with large step size
- Reduce until sufficient decrease condition met
- Incorporate momentum terms to accelerate convergence
- Implement early stopping to prevent overfitting in machine learning applications
Convergence Properties of Steepest Descent
Convergence Characteristics
- Linear convergence rate (slower than higher-order methods)
- Guaranteed convergence for strictly convex functions with Lipschitz continuous gradients
- Zigzag phenomenon slows convergence in ill-conditioned problems
- Takes steps nearly orthogonal to optimal direction
- Results in inefficient path to optimum
- Performance sensitive to objective function scaling
- Convergence rate depends on Hessian matrix condition number at optimum
- Quadratic functions worst-case convergence rate related to Hessian eigenvalue ratio
- Struggles with saddle points and plateau regions
Factors Affecting Convergence
- Initial starting point selection impacts convergence speed
- Step size choice critical for balancing convergence speed and stability
- Too large may cause overshooting and divergence
- Too small leads to slow convergence
- Problem dimensionality affects convergence rate
- Higher dimensions generally require more iterations
- Function curvature influences convergence behavior
- Highly curved regions may cause slow progress
- Noise in gradient estimates can impact convergence (stochastic settings)
Steepest Descent vs Other Techniques
Comparison with Newton's Method
- Steepest descent less efficient than Newton's method for smooth, well-conditioned problems
- Newton's method requires second-order derivative information (Hessian matrix)
- Steepest descent more suitable for large-scale problems where Hessian computation prohibitive
- Newton's method converges quadratically near optimum, steepest descent linearly
- Steepest descent more robust to initial point selection
Comparison with Other Gradient-Based Methods
- Conjugate gradient methods often outperform steepest descent
- Use information from previous iterations to improve search direction
- Particularly effective for quadratic functions
- Momentum-based variants improve convergence rates
- Heavy ball method adds momentum term to update rule
- Nesterov's accelerated gradient uses "look-ahead" step
- Stochastic gradient descent preferred for large-scale machine learning
- Handles noisy gradients and large datasets efficiently
- Mini-batch processing allows for frequent updates
Applicability to Different Problem Types
- Steepest descent effective for smooth, unconstrained optimization
- Subgradient methods more appropriate for non-smooth optimization
- Proximal gradient methods handle composite optimization problems
- Trust region methods provide better global convergence properties
- Quasi-Newton methods (BFGS, L-BFGS) offer superlinear convergence without explicit Hessian computation