Feedback control systems are the backbone of modern engineering, allowing us to tame complex systems and achieve desired outcomes. By continuously monitoring and adjusting, these systems compensate for disturbances and uncertainties, improving performance and stability.
From cruise control to industrial robots, feedback control is everywhere. It's all about comparing what we want with what we've got, then tweaking things to make them match. This powerful concept forms the foundation for understanding PID controllers and more advanced control strategies.
Feedback Control Systems
Fundamental Concepts
- Feedback control systems use measurements of the system output to adjust the input signal to achieve the desired output response
- This closed-loop configuration allows the system to compensate for disturbances and uncertainties
- The performance of a feedback control system is characterized by various metrics
- Steady-state error
- Transient response
- Settling time
- Overshoot
- Stability margins
Components of Feedback Control Systems
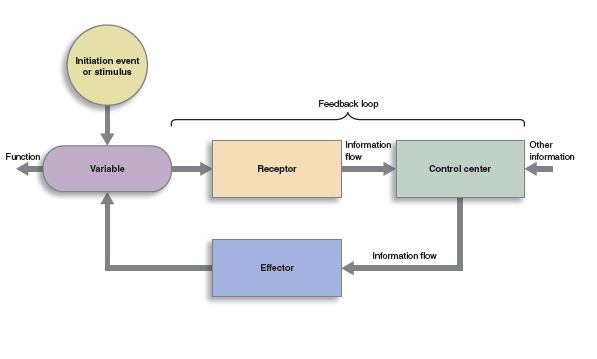
- The basic components of a feedback control system include:
- Plant: The system to be controlled
- Sensors: Measure the output
- Controller: Generates the control signal based on the error between the desired and actual output
- Actuators: Apply the control signal to the plant
- The control system compares the measured output with the reference input to determine the error signal
- The error signal is used by the controller to generate an appropriate control signal to drive the plant towards the desired output
- Feedback control systems can be classified as:
- Negative feedback: Reduces the error between the desired and actual output (thermostat)
- Positive feedback: Amplifies the error and can lead to instability (audio feedback in a microphone)
Feedback Effects on Systems

Stability and Robustness
- Feedback can improve system stability by reducing the sensitivity of the closed-loop system to external disturbances and parameter variations compared to open-loop systems
- However, improperly designed feedback can also introduce instability, especially if:
- The loop gain is too high
- There are significant delays in the feedback loop
- The stability of a feedback control system can be assessed using techniques such as:
- Routh-Hurwitz criterion
- Root locus plots
- Nyquist plots
- Bode plots
- These techniques analyze the system's transfer function and determine the conditions for stability
- Robustness refers to a system's ability to maintain performance and stability in the presence of uncertainties (model inaccuracies, parameter variations, external disturbances)
- Feedback control can improve robustness by desensitizing the system to these uncertainties
Performance Enhancement
- Feedback can enhance system performance by:
- Reducing steady-state errors
- Improving transient response
- Increasing the system's ability to track reference inputs
- Examples of performance enhancement through feedback control:
- Cruise control in vehicles maintains a constant speed despite changes in road conditions or wind resistance
- Voltage regulators in power supplies maintain a constant output voltage despite fluctuations in load or input voltage
Open-Loop vs Closed-Loop Control
Open-Loop Control Systems
- Open-loop control systems do not use feedback to adjust the control signal based on the system output
- The control signal is determined solely by the input signal and the system model
- Open-loop systems are simpler to design and implement but are more sensitive to:
- Disturbances
- Parameter variations
- Modeling errors
- They cannot compensate for these factors as they do not monitor the system output
- Examples of open-loop control systems:
- Toaster with a fixed timer
- Traffic light with predetermined timing sequences
Closed-Loop Control Systems
- Closed-loop control systems, also known as feedback control systems, use measurements of the system output to continuously adjust the control signal to achieve the desired output response
- Closed-loop systems are more complex but offer:
- Improved performance
- Stability
- Robustness
- They continuously monitor the system output and adjust the control signal accordingly
- In some cases, a combination of open-loop and closed-loop control, known as feedforward-feedback control, can be used to leverage the advantages of both approaches
- Feedforward control anticipates disturbances and adjusts the control signal preemptively
- Feedback control corrects for any remaining errors or uncertainties
Advantages and Limitations of Feedback Control
Advantages
- Improved performance:
- Reduced steady-state errors
- Better transient response
- Increased robustness to uncertainties and disturbances
- Ability to stabilize unstable systems
- Wide range of applications:
- Process control (temperature, pressure, flow)
- Motion control (robotics, automotive systems)
- Power systems (voltage and frequency regulation)
Limitations
- Potential for instability if the system is not properly designed
- Need for accurate sensors and actuators
- Increased complexity and cost compared to open-loop systems
- May not be suitable for systems with large delays, as the delayed feedback can lead to:
- Instability
- Poor performance
- Limitations of sensor and actuator bandwidth may restrict the achievable performance in high-speed or high-precision systems