Communication and networking are crucial for autonomous robots to interact with their environment and each other. These systems enable data exchange, coordination, and decision-making across multiple devices and platforms.
From protocols and topologies to wireless and wired communication, understanding these concepts is key. Security, data transmission, network management, and multi-robot communication are also essential for building robust and efficient autonomous robot systems.
Communication protocols
- Communication protocols define the rules and standards for exchanging data between devices in a network
- Protocols specify the format, timing, sequencing, and error checking of data transmission
- Selecting the appropriate communication protocol is crucial for ensuring reliable and efficient communication in autonomous robot systems
Serial communication
- Transmits data one bit at a time over a single communication channel
- Commonly used for short-distance, low-speed communication between devices (microcontrollers, sensors, actuators)
- Examples of serial communication protocols include UART, RS-232, and RS-485
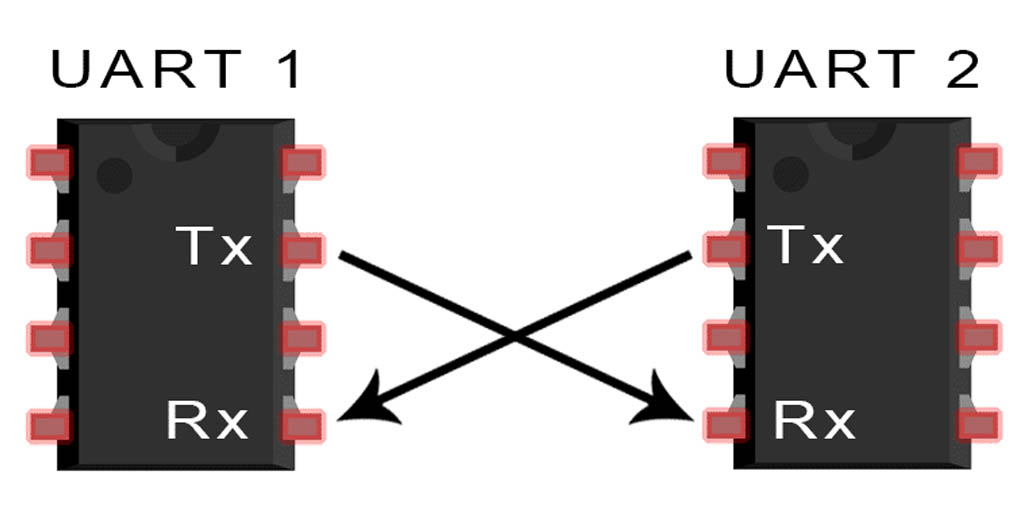
- UART (Universal Asynchronous Receiver/Transmitter) is a widely used serial communication protocol that transmits data asynchronously without a clock signal
- RS-232 is a standard for serial communication that defines the electrical characteristics and timing of signals
Parallel communication
- Transmits multiple bits simultaneously over multiple communication channels
- Offers higher data transfer rates compared to serial communication but requires more wires and is less common in modern systems
- Examples of parallel communication interfaces include IEEE-488 (GPIB) and Centronics
Synchronous vs asynchronous
- Synchronous communication requires a shared clock signal between the transmitter and receiver to keep data transmission synchronized
- Ensures precise timing and reduces the need for complex synchronization mechanisms
- Examples of synchronous communication protocols include I2C and SPI
- Asynchronous communication does not rely on a shared clock signal, and the timing is determined by the transmitter and receiver independently
- More flexible and easier to implement but may require additional synchronization mechanisms
- Examples of asynchronous communication protocols include UART and RS-232
Error detection and correction
- Ensures data integrity during transmission by detecting and correcting errors caused by noise, interference, or other factors
- Error detection techniques include parity bits, checksums, and cyclic redundancy checks (CRC)
- Parity bits add an extra bit to each data unit to make the total number of 1s even (even parity) or odd (odd parity)
- Checksums calculate a sum of the data bytes and append it to the transmitted data for comparison at the receiver
- Error correction techniques, such as forward error correction (FEC), enable the receiver to correct errors without requesting retransmission
Network topologies
- Network topology refers to the arrangement and interconnection of devices in a network
- The choice of network topology affects factors such as scalability, reliability, and performance in autonomous robot systems
Bus topology
- All devices are connected to a single, shared communication channel (bus)
- Simple and cost-effective to implement but has limited scalability and is vulnerable to single points of failure
- Commonly used in small-scale networks, such as in-vehicle communication systems (CAN bus)
Star topology
- All devices are connected to a central hub or switch, which manages the communication between devices
- Offers better scalability and performance compared to bus topology but relies on the central hub for communication
- Widely used in Ethernet-based networks and wireless networks with a central access point (Wi-Fi)
Mesh topology
- Each device is connected to multiple other devices, forming a mesh-like structure
- Provides high redundancy, fault tolerance, and self-healing capabilities, as data can be routed through alternative paths if a link fails
- Suitable for large-scale, distributed networks, such as swarm robotics and ad hoc wireless sensor networks
Hybrid topologies
- Combine elements of different network topologies to achieve specific goals or adapt to the requirements of the application
- Examples include star-bus topology, where multiple star networks are connected via a common bus, and tree topology, which is a hierarchical combination of star and bus topologies
Wireless communication
- Wireless communication enables data exchange between devices without the need for physical connections
- Offers flexibility, mobility, and scalability but may be subject to interference, security risks, and power constraints
Radio frequency (RF)
- Uses electromagnetic waves in the radio frequency spectrum to transmit data wirelessly
- Covers a wide range of frequencies and applications, from short-range, low-power communication (Bluetooth, Zigbee) to long-range, high-bandwidth communication (Wi-Fi, cellular networks)
- Requires proper antenna design, modulation techniques, and frequency allocation to ensure reliable communication
Bluetooth
- A short-range wireless communication standard that operates in the 2.4 GHz ISM band
- Designed for low-power, low-cost, and ad hoc communication between devices
- Commonly used for connecting peripherals (sensors, actuators) to control units or for communication between nearby robots
Wi-Fi
- A wireless local area network (WLAN) technology based on the IEEE 802.11 standards
- Operates in the 2.4 GHz and 5 GHz frequency bands and offers high data rates and medium-range coverage
- Widely used for connecting robots to local networks, enabling remote access, monitoring, and control
Cellular networks
- Wireless communication networks based on cellular technology, such as 4G (LTE) and 5G
- Provide wide-area coverage, high data rates, and support for mobile devices
- Enable robots to communicate over long distances, access cloud services, and interact with remote systems
Wired communication
- Wired communication relies on physical connections (cables) to transmit data between devices
- Offers high reliability, security, and performance but requires cable installation and limits mobility
Ethernet
- A family of wired network technologies based on the IEEE 802.3 standards
- Provides high-speed, reliable, and scalable communication over twisted-pair, coaxial, or fiber-optic cables
- Widely used in industrial automation, robotics, and local area networks (LANs) for connecting devices and systems
CAN bus
- Controller Area Network (CAN) is a robust, real-time, and fault-tolerant bus standard for wired communication
- Designed for high-noise environments and prioritized message transmission
- Commonly used in automotive systems, industrial automation, and distributed control systems
RS-232 and RS-485
- Serial communication standards that define the electrical characteristics and protocols for data exchange
- RS-232 is a point-to-point, full-duplex standard for short-distance communication between devices
- RS-485 is a multi-point, half-duplex standard that supports longer distances and multiple devices on a single bus
I2C and SPI
- Synchronous serial communication protocols for connecting peripherals to microcontrollers or processors
- I2C (Inter-Integrated Circuit) is a multi-master, multi-slave protocol that uses two wires (SCL for clock and SDA for data)
- SPI (Serial Peripheral Interface) is a full-duplex, master-slave protocol that uses four wires (SCLK, MOSI, MISO, and SS)
Network layers
- Network layers define a hierarchical structure for organizing communication functions and protocols
- Each layer provides services to the layer above it and relies on the services provided by the layer below it
Physical layer
- The lowest layer in the network hierarchy, responsible for the physical transmission of data over a communication medium
- Defines the electrical, mechanical, and functional characteristics of the communication channel
- Examples include Ethernet physical layer (IEEE 802.3), Wi-Fi physical layer (IEEE 802.11), and CAN physical layer (ISO 11898)
Data link layer
- Provides reliable data transfer between two directly connected devices, detecting and correcting errors that may occur in the physical layer
- Defines the format of data frames, addressing, and medium access control (MAC) mechanisms
- Examples include Ethernet MAC (IEEE 802.3), Wi-Fi MAC (IEEE 802.11), and CAN data link layer (ISO 11898)
Network layer
- Responsible for routing data packets between devices across multiple network segments
- Defines the addressing scheme, packet format, and routing protocols used to deliver data to its destination
- Examples include Internet Protocol (IP), IPv6, and routing protocols such as OSPF and BGP
Transport layer
- Provides end-to-end communication services between applications running on different devices
- Ensures reliable, ordered, and error-free delivery of data, and manages flow control and congestion control
- Examples include Transmission Control Protocol (TCP) and User Datagram Protocol (UDP)
Communication security
- Ensures the confidentiality, integrity, and availability of data exchanged between devices in a network
- Protects against unauthorized access, tampering, and attacks that could compromise the operation of autonomous robot systems
Encryption methods
- Encryption is the process of converting plaintext data into a ciphertext format that is unreadable without the corresponding decryption key
- Symmetric encryption uses the same key for both encryption and decryption (AES, DES)
- Asymmetric encryption uses a pair of keys: a public key for encryption and a private key for decryption (RSA, ECC)
Authentication and authorization
- Authentication is the process of verifying the identity of a device or user to ensure that they are who they claim to be
- Authorization is the process of granting or denying access to specific resources or actions based on the authenticated identity
- Methods include password-based authentication, digital certificates, and token-based authentication (JWT, OAuth)
Secure communication protocols
- Secure communication protocols provide encryption, authentication, and integrity protection for data exchanged over a network
- Examples include Transport Layer Security (TLS) for secure HTTP communication, Secure Shell (SSH) for secure remote access, and IPsec for secure IP communication

Vulnerability and attack prevention
- Regularly updating software and firmware to patch known vulnerabilities and security flaws
- Implementing firewalls, intrusion detection systems (IDS), and intrusion prevention systems (IPS) to monitor and block suspicious network activity
- Conducting security audits and penetration testing to identify and mitigate potential security risks
Data transmission
- Data transmission refers to the process of sending data from one device to another over a communication channel
- Efficient and reliable data transmission is crucial for the performance and functionality of autonomous robot systems
Bandwidth and throughput
- Bandwidth is the maximum amount of data that can be transmitted over a communication channel per unit of time
- Throughput is the actual amount of data successfully transmitted over a channel, which may be lower than the bandwidth due to various factors (latency, packet loss, overhead)
- Maximizing throughput requires optimizing data encoding, compression, and transmission techniques
Latency and jitter
- Latency is the time delay between the transmission of data from the source and its reception at the destination
- Jitter is the variation in latency over time, which can affect the consistency and predictability of data delivery
- Minimizing latency and jitter is essential for real-time applications, such as robot control and sensor data processing
Packet loss and retransmission
- Packet loss occurs when data packets fail to reach their destination due to network congestion, interference, or other factors
- Retransmission mechanisms, such as Automatic Repeat Request (ARQ), enable the sender to retransmit lost packets based on acknowledgments from the receiver
- Balancing the trade-off between retransmission overhead and data reliability is important for optimizing network performance
Quality of Service (QoS)
- QoS refers to the ability of a network to provide differentiated services and prioritize certain types of traffic over others
- QoS mechanisms include traffic classification, prioritization, and resource reservation
- Implementing QoS is essential for ensuring the timely delivery of critical data, such as control commands and sensor data, in the presence of network congestion or interference
Network management
- Network management involves monitoring, configuring, and maintaining the communication infrastructure of autonomous robot systems
- Effective network management ensures the reliable operation, performance, and security of the network
Network monitoring and diagnostics
- Continuously monitoring network performance, traffic patterns, and resource utilization to detect anomalies, bottlenecks, and potential issues
- Using network monitoring tools and protocols, such as Simple Network Management Protocol (SNMP) and syslog, to collect and analyze network data
- Implementing diagnostic procedures and troubleshooting techniques to identify and resolve network problems
Remote access and control
- Providing secure remote access to network devices and systems for configuration, maintenance, and troubleshooting purposes
- Using remote access protocols, such as Secure Shell (SSH) and Virtual Network Computing (VNC), to establish secure connections
- Implementing access control mechanisms, such as role-based access control (RBAC) and multi-factor authentication (MFA), to ensure authorized access
Firmware updates and patching
- Regularly updating the firmware of network devices, such as routers, switches, and gateways, to address security vulnerabilities, fix bugs, and improve performance
- Establishing a firmware update process that ensures the integrity and authenticity of the firmware images
- Scheduling firmware updates to minimize disruption to the network and the operation of the autonomous robot system
Scalability and expandability
- Designing the network architecture and selecting network technologies that can accommodate future growth and expansion
- Implementing modular and hierarchical network designs that allow for the addition of new devices, segments, and functionality without disrupting the existing network
- Using network virtualization techniques, such as virtual LANs (VLANs) and software-defined networking (SDN), to create flexible and adaptable network environments
Multi-robot communication
- Multi-robot communication enables the coordination, collaboration, and information sharing among multiple autonomous robots working together
- Effective multi-robot communication is essential for achieving complex tasks, adapting to dynamic environments, and improving overall system performance
Collaborative task execution
- Enabling multiple robots to work together on a common task by exchanging information, coordinating actions, and synchronizing their efforts
- Using task allocation and scheduling algorithms to assign subtasks to individual robots based on their capabilities, location, and availability
- Implementing communication protocols and data exchange formats that facilitate the sharing of task-related information, such as goals, progress, and outcomes
Swarm intelligence
- Swarm intelligence emerges from the collective behavior of decentralized, self-organized systems, such as swarms of robots
- Relies on local interactions and simple rules to achieve complex, adaptive, and robust behavior at the global level
- Examples of swarm intelligence algorithms include ant colony optimization (ACO), particle swarm optimization (PSO), and bee colony optimization (BCO)
Distributed decision making
- Enabling multiple robots to make decisions autonomously based on their local information and the information received from other robots
- Using consensus algorithms, such as Paxos and Raft, to reach agreement among robots on a common course of action
- Implementing distributed control architectures, such as behavior-based control and market-based control, to coordinate the decision-making process
Coordination and synchronization
- Ensuring that the actions and movements of multiple robots are coordinated and synchronized to avoid conflicts, collisions, and inefficiencies
- Using coordination mechanisms, such as leader-follower, virtual structure, and behavior-based approaches, to maintain the desired spatial and temporal relationships among robots
- Implementing synchronization techniques, such as clock synchronization and event-based synchronization, to ensure that robots operate on a common timescale and respond to events in a coordinated manner