Autonomous vehicles are revolutionizing transportation across various modes. From cars to aircraft, these vehicles employ advanced technologies to operate with minimal human intervention. The level of autonomy varies, ranging from basic driver assistance to fully autonomous operation.
The SAE defines six levels of vehicle autonomy, from Level 0 (no automation) to Level 5 (full automation). Key components include sensors for perception, powerful onboard computers, and actuators for vehicle control. The software stack handles perception, localization, path planning, and vehicle control.
Types of autonomous vehicles
- Autonomous vehicles encompass a wide range of transportation modes, including cars, trucks, buses, trains, ships, and aircraft, each presenting unique challenges and opportunities for automation
- The level of autonomy can vary significantly across different types of vehicles, from partially automated driver assistance systems to fully autonomous operation without human intervention
- The specific requirements and considerations for implementing autonomous technology differ based on the vehicle type, such as the operating environment, passenger capacity, and safety regulations
Levels of vehicle autonomy
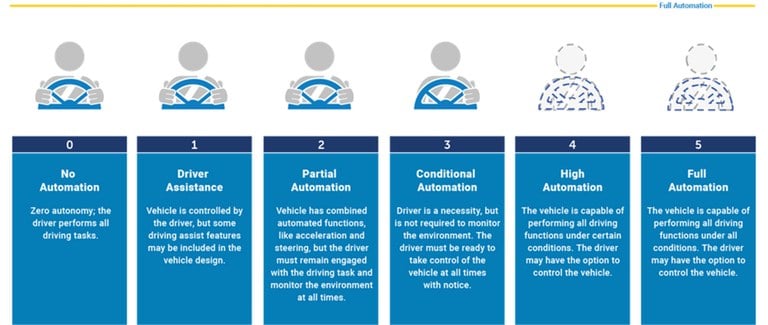
SAE autonomy levels
- The Society of Automotive Engineers (SAE) has defined six levels of vehicle autonomy, ranging from Level 0 (no automation) to Level 5 (full automation)
- Level 0 represents a vehicle with no autonomous capabilities, while Level 1 includes basic driver assistance features like adaptive cruise control
- Levels 2 and 3 involve increasing degrees of automation, with the human driver still responsible for monitoring the environment and taking control when necessary
- Level 4 autonomy allows the vehicle to handle most driving situations independently, but may have limitations in certain conditions (geofenced areas)
- Level 5 represents full autonomy, where the vehicle can operate in all environments without any human intervention
Key components in autonomous vehicles
Sensors for environment perception
- Autonomous vehicles rely on a suite of sensors to perceive and interpret their surroundings, including cameras, lidar, radar, and ultrasonic sensors
- Cameras provide rich visual information for object detection and classification, but can be affected by lighting conditions and weather
- Lidar uses laser pulses to create detailed 3D maps of the environment, enabling precise distance measurements and obstacle detection
- Radar systems complement lidar by providing long-range detection and velocity measurements, particularly in adverse weather conditions
- Ultrasonic sensors are used for short-range object detection, such as in parking assistance systems
Onboard computing systems
- Autonomous vehicles require powerful onboard computing systems to process the vast amounts of sensor data in real-time and make decisions based on that information
- These computing systems typically include high-performance processors, GPUs, and specialized AI accelerators to handle the complex algorithms involved in perception, planning, and control
- The computing hardware must be designed to withstand the harsh automotive environment, including temperature extremes, vibration, and electromagnetic interference
- Redundancy and fail-safe mechanisms are crucial to ensure the reliability and safety of the computing systems in the event of hardware or software failures
Actuators for vehicle control
- Actuators are responsible for translating the decisions made by the autonomous driving software into physical actions that control the vehicle's motion
- Steering actuators, such as electric power steering systems or steer-by-wire technologies, enable precise control of the vehicle's direction
- Throttle and brake actuators regulate the vehicle's speed and stopping distance, often through electronic control systems (drive-by-wire)
- Shift-by-wire systems control the transmission and gear selection in autonomous vehicles, allowing seamless transitions between driving modes
Autonomous driving software stack
Perception algorithms
- Perception algorithms process the raw sensor data to extract meaningful information about the vehicle's environment, such as the location and classification of objects, lane markings, and traffic signs
- Deep learning techniques, particularly convolutional neural networks (CNNs), have revolutionized object detection and classification in computer vision, enabling robust and accurate perception in complex driving scenarios
- Sensor fusion algorithms combine data from multiple sensors to create a more comprehensive and reliable understanding of the environment, compensating for the limitations of individual sensor modalities
- Semantic segmentation and instance segmentation algorithms provide pixel-level classification of the scene, distinguishing between different objects and their boundaries
Localization and mapping
- Localization is the process of determining the vehicle's precise position and orientation within its environment, which is essential for accurate navigation and control
- GPS and inertial measurement units (IMUs) provide global positioning information, but may not be sufficient for the level of precision required in autonomous driving
- Simultaneous Localization and Mapping (SLAM) algorithms use sensor data to construct a detailed map of the environment while simultaneously estimating the vehicle's location within that map
- Feature-based localization techniques match observed landmarks or features in the environment with a pre-existing map to refine the vehicle's position estimate
- High-definition (HD) maps, which include detailed information about road geometry, lane markings, and traffic signs, serve as a reference for localization and path planning
Path planning approaches
- Path planning involves generating a safe and efficient trajectory for the vehicle to follow, considering the vehicle's dynamics, obstacles, traffic rules, and passenger comfort
- Graph-based planners, such as A* and Dijkstra's algorithms, search for the optimal path in a discretized representation of the environment, considering factors like distance, time, and risk
- Sampling-based planners, like Rapidly-exploring Random Trees (RRT) and Probabilistic Road Maps (PRM), generate collision-free paths by randomly sampling the configuration space and connecting feasible points
- Optimization-based planners formulate the path planning problem as a mathematical optimization, seeking to minimize a cost function that balances various objectives (smooth trajectories, obstacle avoidance)
- Reinforcement learning approaches learn optimal planning strategies through trial and error, adapting to complex and dynamic environments
Vehicle control systems
- Vehicle control systems are responsible for executing the planned trajectory and ensuring stable and safe motion of the vehicle
- Longitudinal control manages the vehicle's speed and acceleration, using techniques like adaptive cruise control (ACC) and collision avoidance systems
- Lateral control maintains the vehicle's position within the lane and executes steering maneuvers, employing algorithms such as lane keeping assist (LKA) and active steering control
- Model predictive control (MPC) is a popular approach for vehicle control, as it can handle complex vehicle dynamics and constraints while optimizing performance over a finite horizon
- Robust control techniques, such as H-infinity control and sliding mode control, ensure stable performance in the presence of uncertainties and disturbances
Challenges in autonomous driving
Handling edge cases
- Edge cases refer to rare or unusual situations that fall outside the normal operating conditions for an autonomous vehicle, such as unexpected obstacles, extreme weather, or complex traffic scenarios
- Autonomous vehicles must be able to detect and respond appropriately to these edge cases to ensure safety and reliability, which requires extensive testing and validation
- Collecting and annotating diverse datasets that cover a wide range of edge cases is crucial for training and testing perception and decision-making algorithms
- Simulation environments can help expose autonomous vehicles to a variety of edge cases in a controlled and safe manner, accelerating development and testing
Safety and reliability concerns
- Ensuring the safety and reliability of autonomous vehicles is paramount, as any failures or accidents can have severe consequences for passengers, pedestrians, and other road users
- Rigorous testing and validation processes are necessary to verify the performance and robustness of autonomous driving systems across a wide range of scenarios and conditions
- Redundancy in hardware and software components is essential to maintain safe operation in the event of failures or malfunctions
- Establishing clear safety standards and certification processes for autonomous vehicles is crucial to build public trust and ensure compliance with regulatory requirements

Ethical considerations
- Autonomous vehicles may face ethical dilemmas in certain situations, such as choosing between two potentially harmful outcomes in an unavoidable collision scenario
- Designing decision-making algorithms that align with human values and societal norms is a complex challenge that requires collaboration between engineers, ethicists, and policymakers
- Transparency and explainability in the decision-making process of autonomous vehicles are important to ensure accountability and foster public trust
- Addressing issues of bias and fairness in the training data and algorithms used in autonomous vehicles is crucial to prevent unintended discrimination or unequal treatment of different groups
Legal and regulatory issues
- The deployment of autonomous vehicles raises significant legal and regulatory challenges, as existing frameworks may not adequately address the unique aspects of this technology
- Liability and insurance issues must be clarified, determining responsibility in the event of accidents involving autonomous vehicles (vehicle owners, manufacturers, software providers)
- Establishing consistent and harmonized regulations across different jurisdictions is necessary to enable the smooth operation of autonomous vehicles across borders
- Addressing concerns related to data privacy and security is crucial, as autonomous vehicles collect and process vast amounts of personal and sensitive information
Advantages vs disadvantages
- Autonomous vehicles have the potential to offer numerous benefits, such as increased safety, reduced traffic congestion, improved mobility for elderly and disabled individuals, and lower emissions
- By eliminating human error, which is a leading cause of accidents, autonomous vehicles could significantly reduce the number of crashes and fatalities on the roads
- Autonomous vehicles can optimize route planning and traffic flow, reducing congestion and improving overall transportation efficiency
- However, there are also potential drawbacks and challenges associated with autonomous vehicles, such as high development and infrastructure costs, job displacement in the transportation sector, and increased vulnerability to cyber attacks
- The transition to autonomous vehicles may also have unintended consequences, such as increased urban sprawl and reduced public transit use, which could negatively impact the environment and social equity
Current state of the technology
Research and development efforts
- Numerous companies, research institutions, and government agencies are actively involved in the development and testing of autonomous vehicle technologies
- Collaboration between industry partners, such as automakers, technology companies, and suppliers, is driving innovation and accelerating progress in the field
- University research groups and national laboratories are conducting fundamental research in areas like perception, planning, and control, pushing the boundaries of autonomous driving capabilities
- Standardization efforts, such as those led by the SAE and ISO, aim to establish common frameworks and interfaces for autonomous vehicle systems, promoting interoperability and consistency
Commercial deployment examples
- Several companies have launched limited commercial deployments of autonomous vehicles, primarily in the form of robotaxi services in select cities (Waymo in Phoenix, Arizona)
- Autonomous trucking and delivery services are also being piloted, with companies like TuSimple and Starship Technologies demonstrating the potential for autonomous logistics
- Advanced driver assistance systems (ADAS), which include features like adaptive cruise control, lane keeping assist, and automatic emergency braking, are becoming increasingly common in modern vehicles, paving the way for higher levels of autonomy
- Autonomous shuttles and buses are being deployed in controlled environments, such as university campuses, business parks, and retirement communities, providing a testbed for the technology and gauging public acceptance
Future outlook for autonomous vehicles
- The adoption of autonomous vehicles is expected to grow significantly in the coming years, driven by advances in technology, supportive regulatory frameworks, and increasing public acceptance
- As the technology matures and becomes more affordable, autonomous vehicles are likely to be increasingly integrated into public transportation systems, enhancing accessibility and efficiency
- The widespread deployment of autonomous vehicles could have far-reaching impacts on various sectors, including insurance, urban planning, energy, and healthcare
- However, the timeline for the mass adoption of fully autonomous vehicles remains uncertain, as it depends on overcoming the remaining technical, regulatory, and societal challenges
- Continued research and development efforts, along with collaboration between industry, academia, and government, will be essential to realize the full potential of autonomous vehicles and shape the future of transportation