Priority queues, implemented using binary heaps, are essential data structures in algorithm design. They efficiently manage elements based on priority, allowing quick access to the highest (or lowest) priority item. This implementation is crucial for understanding heap operations and their applications.
Binary heaps, as complete binary trees, offer a balance of simplicity and efficiency. They excel in frequent insertions and deletions of max/min elements, making them ideal for various applications like task scheduling, event simulations, and graph algorithms.
Priority Queues with Binary Heaps
Binary Heap Structure and Properties
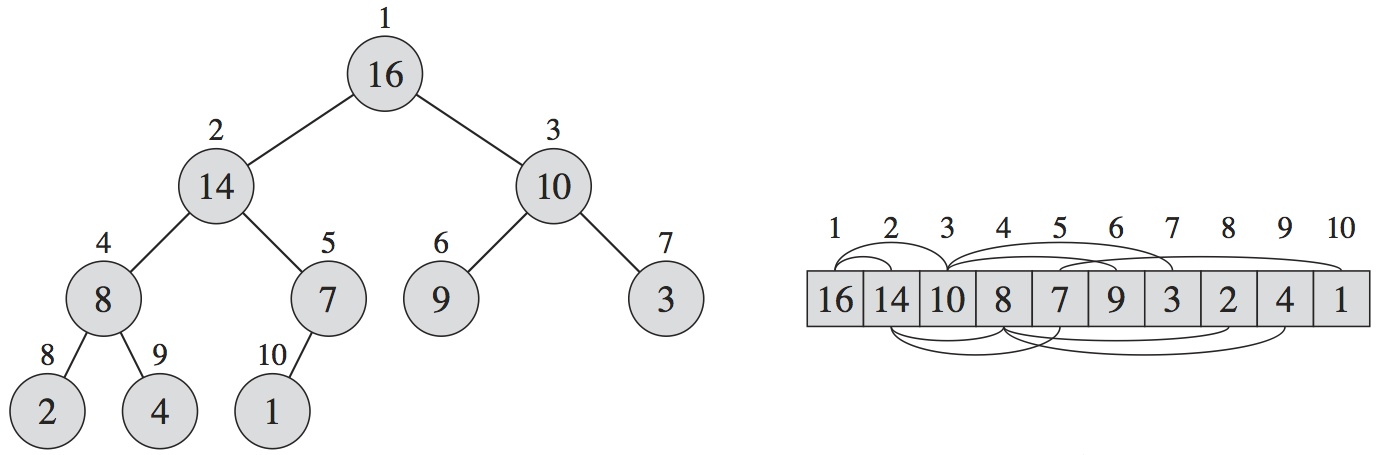
- Binary heap forms a complete binary tree satisfying the heap property
- Max-heap nodes greater than or equal to children
- Min-heap nodes less than or equal to children
- Efficiently implements priority queue operations (insert, delete-max/min, peek)
- Array-based implementation enhances cache efficiency
- Children of node at index i located at 2i+1 and 2i+2 (0-based indexing)
Priority Queue Operations
- Insertion involves adding new element to heap end then "bubbling up"
- Deletion removes root, replaces with last element, then "bubbles down"
- Peek returns root value without modifying heap structure
- Time complexities
- Insert and delete-max/min O(log n)
- Peek O(1)
Implementation Examples
- Max-heap array representation: [100, 19, 36, 17, 3, 25, 1, 2, 7]
- Insertion example
- Insert 50 into [100, 19, 36, 17, 3, 25, 1, 2, 7]
- Add to end: [100, 19, 36, 17, 3, 25, 1, 2, 7, 50]
- Bubble up: [100, 50, 36, 17, 19, 25, 1, 2, 7, 3]
- Deletion example
- Delete max from [100, 50, 36, 17, 19, 25, 1, 2, 7, 3]
- Replace root: [3, 50, 36, 17, 19, 25, 1, 2, 7]
- Bubble down: [50, 19, 36, 17, 3, 25, 1, 2, 7]
Heap Efficiency vs Other Structures
Comparison with Array and List-Based Implementations
- Binary heaps more efficient than unsorted arrays or linked lists
- Insert and delete-max/min O(log n) vs O(n)
- Peek O(1) for both
- Sorted arrays or linked lists less efficient for insertions
- Heap O(log n) vs sorted structure O(n)
- Peek equally efficient O(1)
Comparison with Tree-Based Structures
- Binary Search Trees (BSTs) can implement priority queues
- Heaps generally offer better performance
- Simpler structure and cache-friendly array implementation
- Fibonacci heaps provide improved amortized time complexities
- Insert and decrease-key amortized O(1)
- Increased implementation complexity
Space and Overall Efficiency
- Space complexity of binary heap-based priority queues O(n)
- Comparable to most other implementations
- Binary heaps balance simplicity and efficiency
- Ideal for frequent insertions and max/min element deletions
- Performance comparison example
- Inserting 1 million elements
- Binary heap ≈ 20 million operations
- Unsorted array ≈ 500 billion operations
- Inserting 1 million elements
Priority Queue Applications
Operating Systems and Task Scheduling
- Manage process execution based on priority
- Example scheduling algorithms
- Shortest Job First (SJF)
- Priority Scheduling
- Real-world scenario
- OS assigns higher priority to system processes over user applications
Event-Driven Simulations
- Efficiently process events in chronological order
- Applications
- Network simulations (packet routing)
- Financial market simulations (order processing)
Graph Algorithms
- Dijkstra's algorithm utilizes priority queue for shortest path finding
- A* search optimizes pathfinding
- GPS navigation systems
- Video game AI pathfinding
Data Compression and Networking
- Huffman coding organizes symbols by frequency
- Network packet scheduling
- Prioritize real-time audio/video over lower-priority data

Distributed Systems
- Load balancing across multiple servers
- Task distribution based on server workload and capacity
- Example scenario
- Cloud computing platform allocating resources to incoming job requests
Priority Queue Variations
Specialized Priority Queues
- Monotone priority queues
- Non-decreasing priority insertions
- Allows more efficient implementations (calendar queues)
- Double-ended priority queues (DEPQs)
- Efficient insertion and deletion of both max and min elements
- Applications in sliding window algorithms
Advanced Heap Structures
- Min-max heaps
- O(1) access to both minimum and maximum elements
- O(log n) insertions and deletions
- Binomial heaps
- Efficient merging of priority queues
- Used in advanced graph algorithms (Viterbi algorithm)
- Fibonacci heaps
- Improved amortized time complexity
- Theoretical importance in algorithm design
Self-Adjusting Structures
- Leftist heaps and skew heaps
- Good amortized performance
- Simpler implementation than Fibonacci heaps
- Pairing heaps
- Simple implementation
- Good practical performance
- Example use case
- Optimizing Dijkstra's algorithm in large-scale road networks
Theoretical Optimality
- Brodal queues
- Theoretically optimal priority queue
- O(1) find-min and O(log n) for other operations
- Complex practical implementation
- Primarily of academic interest for algorithm analysis