Surface reconstruction transforms raw 3D data into digital models of real-world objects and scenes. It bridges the gap between 2D images and 3D geometry, enabling applications in computer vision and graphics like object recognition and augmented reality.
The process involves handling point clouds, choosing between mesh and volumetric approaches, and applying various algorithms. Key steps include preprocessing data, implementing reconstruction techniques, and evaluating results using metrics like Hausdorff distance and mean squared error.
Fundamentals of surface reconstruction
- Surface reconstruction plays a crucial role in converting raw 3D data into meaningful digital representations of real-world objects and scenes
- In the context of Images as Data, surface reconstruction bridges the gap between 2D image data and 3D geometric models, enabling various applications in computer vision and graphics
Point cloud representation
- Consists of a set of 3D points in space, typically obtained from sensors like LiDAR or depth cameras
- Each point contains spatial coordinates (x, y, z) and may include additional attributes (color, intensity, normal vectors)
- Unstructured nature of point clouds presents challenges for direct visualization and processing
- Density and distribution of points affect the quality of subsequent reconstruction steps
Mesh vs volumetric reconstruction
- Mesh reconstruction creates a surface composed of polygons (usually triangles) connecting the input points
- Volumetric reconstruction divides space into discrete elements (voxels) and determines which are inside or outside the object
- Mesh models offer compact representation and are suitable for rendering and animation
- Volumetric models handle complex topologies more easily and facilitate operations like boolean operations
Applications in computer vision
- 3D object recognition enables identification and classification of objects based on their geometric structure
- Augmented reality uses reconstructed surfaces to accurately place virtual objects in real environments
- Robotics leverages surface reconstruction for navigation, object manipulation, and environment mapping
- Medical imaging employs reconstruction techniques to create 3D models of organs and tissues from 2D scans
Point cloud preprocessing
Noise reduction techniques
- Bilateral filtering smooths point positions while preserving sharp features and edges
- Moving least squares projection improves surface quality by locally fitting polynomial surfaces
- Statistical outlier removal identifies and eliminates points that deviate significantly from their neighbors
- Voxel grid downsampling reduces point cloud density while maintaining overall shape information
Normal estimation methods
- Principal Component Analysis (PCA) computes surface normals by analyzing the covariance matrix of local neighborhoods
- Robust normal estimation techniques handle sharp features and thin structures more accurately
- Multi-scale normal estimation adapts the neighborhood size to local surface characteristics
- Normal orientation disambiguation resolves ambiguities in normal direction using visibility information or propagation methods
Outlier removal strategies
- Radius-based outlier removal eliminates points with few neighbors within a specified radius
- Conditional removal filters points based on user-defined criteria (color, intensity, etc.)
- Clustering-based methods group points and remove small isolated clusters
- Machine learning approaches train models to classify points as inliers or outliers based on local geometric features
Surface reconstruction algorithms
Delaunay triangulation
- Creates a triangulation where no point lies inside the circumcircle of any triangle
- Maximizes the minimum angle of all triangles, avoiding thin, elongated triangles
- 3D extension (tetrahedralization) forms the basis for many surface reconstruction methods
- Constrained Delaunay triangulation incorporates additional constraints to preserve specific edges or features
Poisson reconstruction
- Formulates surface reconstruction as a spatial Poisson problem
- Computes an implicit function whose gradient best approximates the input point normals
- Extracts the final surface as an isosurface of the computed implicit function
- Handles noise and incomplete data well, producing watertight surfaces
- Octree-based implementation allows for efficient processing of large point clouds
Marching cubes algorithm
- Extracts a polygonal mesh from a 3D scalar field (implicit function)
- Divides space into cubes and determines how the surface intersects each cube
- Uses a lookup table to efficiently generate triangle configurations for each cube
- Produces consistent results but can introduce stair-step artifacts on smooth surfaces
- Variants like Dual Contouring improve the handling of sharp features
Alpha shapes method
- Generalizes the concept of convex hull to capture the "shape" of a point set
- Controls the level of detail using the alpha parameter (smaller alpha captures finer details)
- Connects points with spheres of radius alpha to form the alpha shape
- Useful for reconstructing surfaces with holes and concavities
- Challenges include selecting an appropriate alpha value and handling non-uniform point distributions
Implicit surface representations
Signed distance functions
- Represent surfaces as the zero level set of a function that gives the signed distance to the surface
- Positive values indicate points outside the surface, negative values inside
- Enable efficient ray tracing, collision detection, and boolean operations
- Can be approximated using various techniques (point-based methods, learning-based approaches)
- Challenges include representing sharp features and handling thin structures

Radial basis functions
- Approximate implicit surfaces using a sum of radially symmetric basis functions
- Each basis function is centered at a sample point and contributes to the overall implicit function
- Common choices include Gaussian and polyharmonic splines
- Offer smooth interpolation between scattered data points
- Can handle non-uniformly sampled data and produce watertight surfaces
- Computational complexity can be high for large point sets, requiring acceleration techniques
Level set methods
- Represent surfaces as the zero level set of a higher-dimensional function
- Enable topological changes (merging, splitting) during surface evolution
- Useful for surface deformation, segmentation, and multi-phase reconstruction
- Can incorporate prior knowledge and constraints into the reconstruction process
- Challenges include computational cost and numerical stability issues
Mesh-based reconstruction
Advancing front techniques
- Start from seed triangles and grow the surface by adding new triangles along the boundary
- Maintain a "front" of active edges where new triangles are created
- Well-suited for reconstructing surfaces with boundaries or holes
- Can incorporate local surface properties to guide triangle creation
- Challenges include handling complex topologies and ensuring global consistency
Ball-pivoting algorithm
- Conceptually simple method that "rolls" a ball of fixed radius over the point cloud
- Creates triangles where the ball touches three points without containing any other points
- Preserves sharp features and handles non-uniform point distributions well
- Sensitive to noise and may produce holes in areas with insufficient point density
- Extensions incorporate variable ball sizes to adapt to local point density
Greedy projection triangulation
- Projects points onto local tangent planes and performs 2D triangulation
- Iteratively adds new triangles based on local criteria (edge length, angle)
- Efficient for large point clouds and can handle varying point densities
- May produce inconsistent results in areas with complex geometry or sharp features
- Often used as an initial step in multi-stage reconstruction pipelines
Volumetric reconstruction
Voxel grid representation
- Divides 3D space into a regular grid of cubic elements (voxels)
- Each voxel stores occupancy information (empty, solid, or surface)
- Enables efficient spatial queries and boolean operations
- Memory-intensive for high-resolution reconstructions
- Well-suited for fusion of multiple depth maps or point clouds
Octree-based methods
- Hierarchical data structure that recursively subdivides space into octants
- Adapts to local geometric complexity, providing fine detail where needed
- Reduces memory usage compared to uniform voxel grids
- Facilitates multi-resolution analysis and level-of-detail rendering
- Challenges include maintaining consistency across octree boundaries
Signed distance field generation
- Creates a volumetric representation of the signed distance to the surface
- Can be computed from point clouds, meshes, or multiple depth maps
- Enables smooth blending of multiple scans or partial reconstructions
- Supports efficient ray casting and collision detection operations
- Truncated signed distance fields (TSDF) limit the computation to a narrow band around the surface
Multi-view stereo reconstruction
Image-based vs geometry-based
- Image-based methods operate directly on pixel intensities and correspondences
- Geometry-based approaches work with 3D points or volumetric representations
- Image-based techniques often produce denser reconstructions but can be sensitive to texture and lighting
- Geometry-based methods are more robust to appearance variations but may struggle with fine details
- Hybrid approaches combine both paradigms to leverage their respective strengths
Patch-based multi-view stereo
- Reconstructs the surface as a collection of oriented patches
- Iteratively expands and filters patches based on photo-consistency across multiple views
- Handles complex geometries and produces detailed reconstructions
- Computationally intensive, especially for large numbers of images
- Challenges include merging overlapping patches and handling textureless regions
Volumetric multi-view stereo
- Reconstructs surfaces within a 3D volume, often using occupancy grids or signed distance fields
- Fuses information from multiple depth maps or directly optimizes 3D occupancy
- Well-suited for capturing complete, watertight models
- Can incorporate visibility constraints and handle occlusions naturally
- Memory requirements can be high for large-scale reconstructions
Texture mapping
UV unwrapping techniques
- Process of creating 2D parameterization of 3D surfaces for texture mapping
- Aims to minimize distortion and optimize texture space utilization
- Automatic methods include least squares conformal mapping and angle-based flattening
- Manual UV unwrapping allows artists to control seam placement and texture distribution
- Challenges include handling complex topologies and preserving important features
Texture synthesis methods
- Generate new textures based on input exemplars or captured image data
- Patch-based synthesis stitches together small texture patches to cover the surface
- Optimization-based approaches minimize the difference between synthesized and input textures
- Enables creation of seamless, tileable textures for large surfaces
- Can fill in missing or occluded regions in multi-view reconstructions
Photometric stereo for texturing
- Recovers surface normals and albedo from multiple images under varying lighting conditions
- Enables high-quality texture recovery, separating geometry from material properties
- Can capture fine surface details beyond the resolution of the geometric reconstruction
- Challenges include handling non-Lambertian materials and complex lighting environments
- Integration with geometric reconstruction improves overall model quality
Evaluation metrics
Hausdorff distance
- Measures the maximum distance between two surfaces
- Computed as the maximum of the minimum distances from each point on one surface to the other
- Sensitive to outliers and captures worst-case errors
- Variants include one-sided Hausdorff distance and average Hausdorff distance
- Useful for detecting large localized errors in reconstruction
Mean squared error
- Computes the average squared distance between corresponding points on two surfaces
- Provides a global measure of reconstruction accuracy
- Less sensitive to outliers compared to Hausdorff distance
- Can be weighted to emphasize certain regions or features
- Challenges include establishing reliable point correspondences between surfaces
Visual quality assessment
- Subjective evaluation of reconstruction quality by human observers
- Considers factors like completeness, smoothness, and preservation of important features
- Often used in conjunction with quantitative metrics to assess overall reconstruction quality
- Can be formalized through user studies or perceptual quality metrics
- Important for applications where visual appearance is critical (virtual reality, digital heritage)
Challenges in surface reconstruction
Handling incomplete data
- Addresses issues of occlusions, limited sensor range, and sparse sampling
- Hole-filling techniques interpolate missing regions based on surrounding geometry
- Statistical priors and shape completion methods leverage learned models to infer missing structure
- Multi-view fusion combines partial reconstructions to create more complete models
- Challenges include maintaining consistency and avoiding hallucination of non-existent features
Dealing with large-scale scenes
- Addresses computational and memory constraints for reconstructing extensive environments
- Out-of-core algorithms process data in chunks, enabling reconstruction of scenes larger than available memory
- Hierarchical representations (octrees, multi-resolution meshes) adapt detail levels to scene complexity
- Distributed and parallel processing techniques leverage multiple computers or GPUs
- Streaming reconstruction methods update models incrementally as new data becomes available
Real-time reconstruction issues
- Balances reconstruction quality with computational efficiency for interactive applications
- Incremental reconstruction techniques update models as new data arrives
- GPU-accelerated algorithms leverage parallel processing for faster computation
- Adaptive sampling and simplification methods focus computational resources on important regions
- Challenges include maintaining temporal consistency and handling dynamic scenes
Advanced topics
Deep learning for reconstruction
- Leverages neural networks to learn implicit or explicit surface representations
- Enables end-to-end reconstruction from various input modalities (images, point clouds, voxels)
- Neural implicit representations (NeRF, DeepSDF) offer compact and detailed scene modeling
- Learning-based completion and refinement improve robustness to noise and missing data
- Challenges include generalization to unseen objects and interpretability of learned representations
Non-rigid surface reconstruction
- Addresses reconstruction of deformable objects and dynamic scenes
- Template-based methods deform a base model to fit observed data
- Non-rigid registration techniques align multiple partial scans of deforming objects
- Space-time reconstruction considers temporal coherence in dynamic scene modeling
- Applications include performance capture, medical imaging, and facial animation
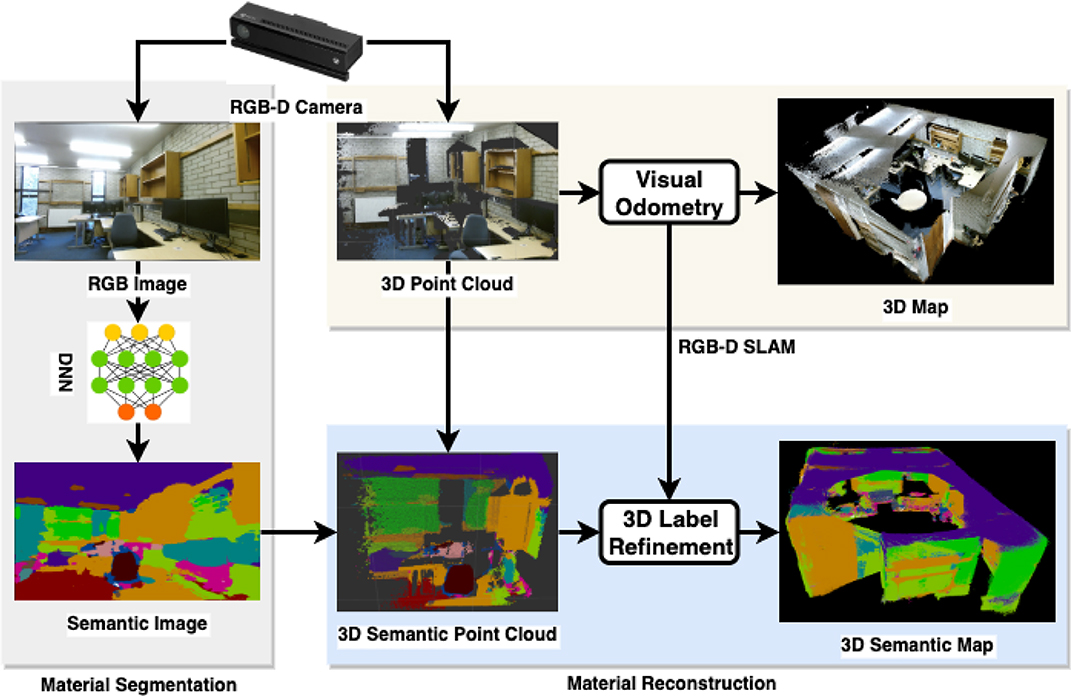
Semantic surface reconstruction
- Combines geometric reconstruction with semantic understanding of scene contents
- Integrates object detection, segmentation, and classification with surface modeling
- Enables intelligent scene completion based on recognized object categories
- Facilitates high-level reasoning about scene structure and relationships
- Challenges include handling unknown object categories and resolving ambiguities in complex scenes