GPS positioning is a crucial aspect of geospatial engineering, relying on trilateration and precise timing to determine location. This topic covers the fundamentals of GPS, including satellite orbits, signal structure, and receiver design, providing a foundation for understanding positioning methods.
Advanced techniques like differential positioning, carrier-phase measurements, and augmentation systems enhance GPS accuracy and reliability. The chapter explores error sources, mitigation strategies, and applications in surveying, construction, and navigation, showcasing GPS's versatility in geospatial engineering.
Fundamentals of GPS positioning
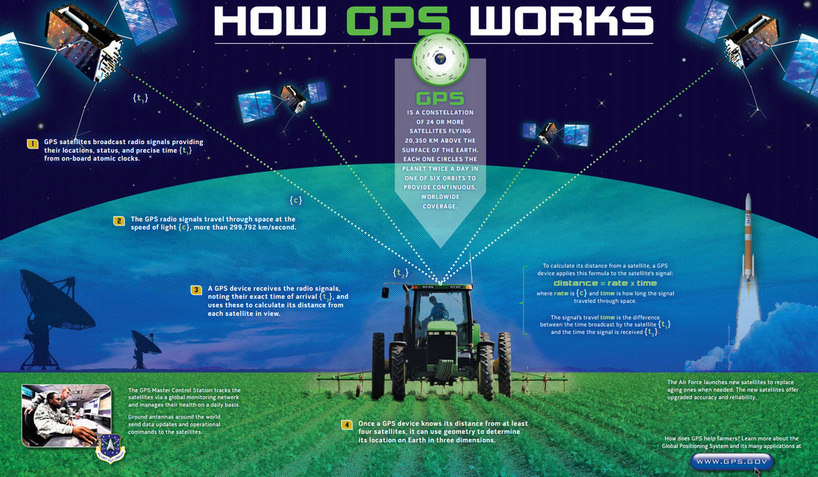
- GPS positioning relies on the principles of trilateration, which involves determining the position of a receiver based on its distance from multiple satellites
- Accurate timing is crucial for GPS positioning, as it allows for the calculation of pseudoranges between the receiver and satellites
- GPS satellites orbit the Earth in a constellation that ensures global coverage and continuous availability of positioning signals
Trilateration principles
- Trilateration calculates the position of a receiver by measuring its distance from at least three satellites with known positions
- The distance between the receiver and each satellite forms a sphere, and the intersection of these spheres determines the receiver's position
- In three-dimensional space, four satellites are required to resolve the receiver's position and clock offset
Pseudoranges and timing
- Pseudoranges are the estimated distances between the receiver and satellites, calculated based on the time it takes for the GPS signal to travel from the satellite to the receiver
- GPS satellites and receivers use highly accurate atomic clocks to ensure precise timing and synchronization
- The receiver's clock offset is estimated along with its position to account for any discrepancies between the receiver and satellite clocks
Satellite orbits and constellations
- GPS satellites orbit the Earth at an altitude of approximately 20,200 km in six orbital planes
- The constellation is designed to ensure that at least four satellites are visible from any point on Earth at any given time
- Satellite orbits are precisely monitored and predicted by the GPS control segment, which regularly updates the navigation message broadcast by the satellites
GPS signal structure
- The GPS signal consists of carrier frequencies, pseudorandom noise (PRN) codes, and a navigation message
- Understanding the signal structure is essential for designing GPS receivers and processing GPS data
- The signal structure enables various positioning modes and techniques, such as code-based and carrier-phase positioning
Carrier frequencies and modulation
- GPS satellites broadcast signals on two main carrier frequencies: L1 (1575.42 MHz) and L2 (1227.60 MHz)
- The carrier frequencies are modulated with PRN codes and the navigation message using a technique called binary phase-shift keying (BPSK)
- The L1 frequency carries both the civilian C/A code and the encrypted military P(Y) code, while the L2 frequency primarily carries the P(Y) code
Pseudorandom noise (PRN) codes
- PRN codes are unique sequences of 1s and 0s that identify each GPS satellite and enable receivers to distinguish between signals from different satellites
- The civilian C/A code has a chipping rate of 1.023 MHz and repeats every millisecond, while the military P(Y) code has a chipping rate of 10.23 MHz and repeats every week
- PRN codes also help to minimize the effects of interference and multipath, as they have low cross-correlation properties
Navigation message format
- The navigation message contains essential information for GPS positioning, including satellite ephemeris, clock corrections, and almanac data
- The message is modulated onto the carrier frequencies at a low rate of 50 bits per second
- The complete navigation message consists of 25 frames, each containing 1,500 bits and taking 12.5 minutes to transmit
GPS receiver design
- GPS receivers are designed to capture, process, and interpret GPS signals to determine the receiver's position, velocity, and time
- Key components of a GPS receiver include the antenna, RF front-end, signal processing units, and positioning algorithms
- Advancements in receiver technology have led to improved accuracy, reliability, and versatility of GPS positioning
Antenna characteristics
- GPS antennas are designed to efficiently capture the relatively weak GPS signals while minimizing interference and multipath effects
- Common types of GPS antennas include microstrip patch antennas and helical antennas, which have different gain patterns and polarization properties
- Antenna placement is crucial for optimal signal reception, particularly in challenging environments such as urban canyons or forested areas
RF front-end and signal processing
- The RF front-end is responsible for amplifying, filtering, and downconverting the incoming GPS signals to a suitable intermediate frequency (IF) for digital processing
- Key components of the RF front-end include low-noise amplifiers (LNAs), bandpass filters, and mixers
- Digital signal processing techniques, such as fast Fourier transforms (FFTs) and correlation, are used to extract the PRN codes and navigation message from the IF signal
Acquisition and tracking loops
- Acquisition is the process of initially detecting and identifying the GPS signals from visible satellites, while tracking involves continuously following the signals to maintain a position fix
- Code tracking loops, such as delay-locked loops (DLLs), align the receiver-generated PRN codes with the incoming satellite codes to measure pseudoranges
- Carrier tracking loops, such as phase-locked loops (PLLs), track the carrier phase of the GPS signals, enabling more precise positioning techniques like carrier-phase positioning
Positioning modes and techniques
- GPS positioning can be performed using various modes and techniques, each with its own advantages, limitations, and applications
- The choice of positioning mode and technique depends on factors such as accuracy requirements, available infrastructure, and real-time or post-processing needs
- Combining different positioning modes and techniques can enhance the accuracy, reliability, and efficiency of GPS-based geospatial projects
Stand-alone vs differential positioning
- Stand-alone positioning relies on a single GPS receiver to determine its position using the broadcast ephemeris and clock corrections
- Differential positioning involves using a reference station with a known position to calculate and broadcast corrections to nearby rovers, improving positioning accuracy
- Differential GPS (DGPS) techniques include code-based DGPS, which corrects pseudorange measurements, and carrier-phase DGPS, which corrects carrier phase observations
Code-based vs carrier-phase positioning
- Code-based positioning relies on the pseudorange measurements derived from the PRN codes, typically achieving meter-level accuracy
- Carrier-phase positioning exploits the much shorter wavelength of the carrier frequencies to measure the phase difference between the receiver and satellite signals, enabling centimeter-level accuracy
- Carrier-phase positioning requires more advanced receiver hardware and processing techniques, such as ambiguity resolution, to determine the integer number of carrier cycles between the receiver and satellites
Static vs kinematic positioning
- Static positioning involves determining the position of a stationary receiver over an extended observation period, allowing for high-accuracy solutions
- Kinematic positioning focuses on determining the trajectory of a moving receiver, which requires rapid and continuous position updates
- Kinematic positioning techniques include real-time kinematic (RTK) and post-processed kinematic (PPK), which leverage carrier-phase measurements and differential corrections
Real-time vs post-processing
- Real-time positioning provides immediate position solutions, which is essential for applications like navigation and machine control
- Post-processing involves collecting raw GPS data in the field and processing it later using specialized software, allowing for more advanced error correction and data analysis techniques
- Post-processed solutions generally offer higher accuracy than real-time solutions, as they can incorporate more comprehensive error models and take advantage of forward and backward data processing
Error sources and mitigation
- GPS positioning accuracy is affected by various error sources, which can be categorized as satellite-related, signal propagation-related, or receiver-related errors
- Understanding the nature and magnitude of these errors is crucial for developing effective mitigation strategies
- Error mitigation techniques range from mathematical modeling and correction algorithms to advanced receiver technologies and augmentation systems
Satellite clock and orbit errors
- Satellite clock errors arise from the drift and instability of the atomic clocks onboard the GPS satellites, affecting the accuracy of pseudorange measurements
- Orbit errors occur when the actual satellite positions deviate from the predicted orbits broadcast in the navigation message
- These errors are mitigated through regular updates to the broadcast ephemeris and clock parameters, as well as precise orbit determination techniques used in post-processing
Ionospheric and tropospheric delays
- The ionosphere, a layer of the Earth's atmosphere containing charged particles, causes a frequency-dependent delay in GPS signals, affecting both pseudorange and carrier phase measurements
- The troposphere, the lower part of the Earth's atmosphere, causes a non-dispersive delay in GPS signals due to variations in temperature, pressure, and humidity
- Ionospheric errors can be largely eliminated by combining dual-frequency measurements (L1 and L2) or using ionospheric models, while tropospheric errors are typically modeled using empirical or numerical weather models
Multipath and receiver noise
- Multipath occurs when GPS signals reach the receiver antenna via multiple paths due to reflection or diffraction from nearby surfaces, causing errors in pseudorange and carrier phase measurements
- Receiver noise refers to the inherent electronic noise in the receiver's components, which can affect the accuracy and precision of GPS measurements
- Multipath can be mitigated through antenna design (choke ring antennas), site selection, and advanced signal processing techniques (narrow correlator spacing, multipath estimation algorithms), while receiver noise is minimized through the use of high-quality components and robust tracking loops
Dilution of Precision (DOP)
- DOP is a measure of the geometric strength of the satellite configuration relative to the receiver position, affecting the accuracy of the computed position
- Common DOP metrics include geometric DOP (GDOP), position DOP (PDOP), horizontal DOP (HDOP), and vertical DOP (VDOP)
- Lower DOP values indicate a more favorable satellite geometry and generally result in better positioning accuracy
- DOP can be optimized through careful mission planning (selecting observation times with good satellite visibility) and the use of multi-constellation GNSS receivers
Augmentation systems
- Augmentation systems are designed to enhance the performance, reliability, and integrity of GPS positioning by providing additional correction data, integrity monitoring, or supplementary ranging signals
- These systems can be classified as satellite-based augmentation systems (SBAS) or ground-based augmentation systems (GBAS)
- Augmentation systems play a crucial role in applications that require high accuracy, reliability, and safety, such as aviation, maritime navigation, and precision agriculture
Wide Area Augmentation System (WAAS)
- WAAS is an SBAS developed by the United States Federal Aviation Administration (FAA) to improve GPS accuracy, integrity, and availability for aviation users in North America
- The system consists of a network of ground reference stations, master stations, and geostationary satellites that broadcast correction data and integrity messages
- WAAS enables vertical guidance for aircraft approach operations and provides a positioning accuracy of about 1-2 meters horizontally and 2-3 meters vertically
European Geostationary Navigation Overlay Service (EGNOS)
- EGNOS is the European counterpart to WAAS, serving aviation, maritime, and land-based users in Europe and North Africa
- The system is operated by the European Space Agency (ESA), the European Commission (EC), and EUROCONTROL
- EGNOS broadcasts correction data and integrity information via three geostationary satellites, providing a positioning accuracy similar to that of WAAS

Satellite-Based Augmentation Systems (SBAS)
- SBAS is a general term for satellite-based augmentation systems that provide wide-area or regional coverage
- Other examples of SBAS include the Japanese MTSAT Satellite Augmentation System (MSAS), the Indian GPS-Aided GEO Augmented Navigation (GAGAN) system, and the Russian System for Differential Corrections and Monitoring (SDCM)
- SBAS systems share common principles and architectures, differing mainly in their geographic coverage areas and specific implementation details
Ground-Based Augmentation Systems (GBAS)
- GBAS are local-area augmentation systems that provide differential corrections and integrity monitoring for GPS users in the vicinity of an airport or other localized area
- A typical GBAS consists of a ground facility with multiple reference receivers, processing equipment, and a VHF data broadcast (VDB) transmitter
- GBAS can support precision approach and landing operations, as well as surface movement guidance and surveillance, with centimeter-level accuracy
Advanced GPS techniques
- Advanced GPS techniques leverage the full potential of GPS signals, infrastructure, and processing algorithms to achieve the highest levels of positioning accuracy, reliability, and efficiency
- These techniques often involve the use of carrier-phase measurements, precise satellite orbits and clocks, and sophisticated error modeling and correction methods
- Advanced GPS techniques are essential for applications that demand the utmost precision, such as geodetic surveying, structural monitoring, and scientific research
Precise Point Positioning (PPP)
- PPP is a positioning technique that uses precise satellite orbits, clocks, and error correction models to achieve high-accuracy positioning with a single GPS receiver
- Unlike differential positioning techniques, PPP does not require a nearby reference station, making it suitable for remote or wide-area applications
- PPP typically relies on post-processed data and can achieve centimeter-level accuracy with sufficient observation time and advanced error modeling
Real-Time Kinematic (RTK) positioning
- RTK is a differential GPS technique that provides real-time, centimeter-level positioning using carrier-phase measurements and corrections from a nearby reference station
- The reference station broadcasts its raw observations or correction data to the rover receiver via a radio link or mobile internet connection
- RTK is widely used in applications that require high-accuracy positioning in real-time, such as surveying, construction, and precision agriculture
Network RTK and Virtual Reference Stations (VRS)
- Network RTK extends the concept of RTK positioning by using a network of reference stations to generate and provide correction data for a wider area
- Virtual Reference Stations (VRS) are a specific implementation of network RTK, where the network generates a virtual reference station dataset tailored to the rover's approximate position
- Network RTK and VRS help to mitigate the limitations of single-base RTK, such as the need for a nearby reference station and the impact of distance-dependent errors
Multi-GNSS integration
- Multi-GNSS integration involves the combined use of GPS and other global navigation satellite systems, such as GLONASS, Galileo, and BeiDou, to improve positioning performance
- By leveraging the increased number of visible satellites and the diversity of signal frequencies and orbits, multi-GNSS integration can enhance positioning accuracy, reliability, and availability
- Multi-GNSS integration is particularly beneficial in challenging environments, such as urban canyons or areas with limited sky visibility, where the availability of GPS-only signals may be insufficient
GPS applications in geospatial engineering
- GPS has revolutionized the field of geospatial engineering, providing a powerful tool for accurate, efficient, and cost-effective positioning, mapping, and navigation
- The applications of GPS in geospatial engineering span a wide range of domains, from traditional surveying and mapping to cutting-edge technologies like autonomous vehicles and smart cities
- As GPS continues to evolve and integrate with other geospatial technologies, such as remote sensing, GIS, and BIM, its impact on the geospatial industry is expected to grow even further
Surveying and mapping
- GPS has become an indispensable tool for surveying and mapping applications, enabling faster, more accurate, and more efficient data collection compared to traditional methods
- GPS is used for a variety of surveying tasks, including control surveys, topographic surveys, cadastral surveys, and engineering surveys
- High-accuracy GPS techniques, such as static and RTK positioning, have greatly improved the precision and productivity of surveying operations
Construction and machine control
- GPS is widely used in construction for site layout, earthwork, and machine control applications
- Machine control systems use GPS to guide and automate the operation of construction equipment, such as excavators, graders, and dozers, improving efficiency, accuracy, and safety
- GPS-based machine control enables faster project completion, reduced material waste, and improved quality control, ultimately leading to cost savings and increased productivity
Geographic Information Systems (GIS)
- GPS is a key data source for GIS, providing accurate and up-to-date positioning information for a wide range of geospatial datasets
- GPS data is used to create, update, and enhance various GIS layers, such as transportation networks, land use, and utility infrastructure
- The integration of GPS and GIS enables powerful spatial analysis, modeling, and decision-making capabilities, supporting applications like urban planning, environmental monitoring, and emergency response
Navigation and transportation
- GPS is the primary technology behind modern navigation systems, providing real-time positioning, routing, and guidance for vehicles, aircraft, and vessels
- In the transportation sector, GPS is used for fleet management, asset tracking, and logistics optimization, improving efficiency, safety, and customer service
- GPS is also a key enabler for emerging technologies like autonomous vehicles and intelligent transportation systems, which rely on accurate and reliable positioning information to navigate and interact with their environment