🏎️Engineering Mechanics – Dynamics Unit 8 Review
8.3 Equations of motion in 3D
8.3 Equations of motion in 3D
Unit & Topic Study Guides
Particle Kinematics
Kinetics of Particles in Engineering Mechanics
Work, Energy, and Power in Dynamics
Impulse and Momentum in Dynamics
Rigid Body Kinematics
Kinetics of Rigid Bodies in Dynamics
Energy and Momentum in Rigid Body Dynamics
3D Dynamics in Engineering Mechanics
Vibrations
Gyroscopic Motion in Engineering Dynamics
Orbital Mechanics in Engineering Dynamics
In Engineering Mechanics – Dynamics, equations of motion in 3D are crucial for describing complex systems. These equations combine Newton's laws with 3D kinematics, allowing engineers to analyze and predict the behavior of objects moving through space.
Understanding these equations is essential for solving real-world problems in aerospace, robotics, and sports engineering. They form the foundation for simulating dynamic systems, designing control algorithms, and optimizing mechanical designs in three-dimensional environments.
Coordinate systems in 3D
- Provide essential frameworks for describing motion and position in three-dimensional space
- Form the foundation for analyzing complex dynamic systems in Engineering Mechanics
- Enable mathematical representation of physical phenomena in 3D environments
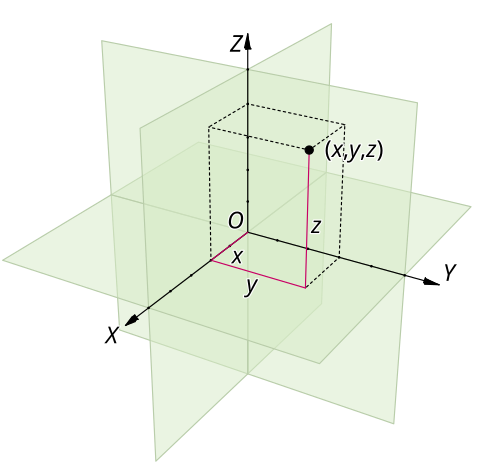
Cartesian coordinate system
- Utilizes three mutually perpendicular axes (x, y, z) to define points in space
- Represents positions using ordered triples (x, y, z)
- Simplifies linear motion analysis and rectangular geometries
- Widely used in computer graphics and CAD software for 3D modeling
Cylindrical coordinate system
- Employs radial distance (r), azimuthal angle (θ), and height (z) to specify locations
- Particularly useful for problems with cylindrical symmetry (pipe flow, rotating machinery)
- Facilitates analysis of rotational motion around a fixed axis
- Converts to Cartesian coordinates using equations:
Spherical coordinate system
- Defines points using radial distance (r), polar angle (θ), and azimuthal angle (φ)
- Ideal for problems involving spherical symmetry (planetary motion, electromagnetic fields)
- Simplifies equations in spherical geometries and radial force fields
- Transforms to Cartesian coordinates through:
Position vectors
- Fundamental concept in dynamics for describing the location of objects in 3D space
- Enable the calculation of distances, velocities, and accelerations between points
- Serve as the basis for deriving more complex kinematic and dynamic relationships
Vector representation
- Expresses position as a directed line segment from the origin to a point in space
- Denoted mathematically as in Cartesian coordinates
- Magnitude gives the distance from the origin:
- Direction cosines relate the vector to the coordinate axes
Components in different coordinates
- Cartesian:
- Cylindrical:
- Spherical:
- Transformation between coordinate systems involves trigonometric functions
- Choice of coordinate system depends on problem geometry and symmetry
Velocity in 3D
- Describes the rate of change of position with respect to time in three-dimensional space
- Crucial for analyzing motion paths, collision avoidance, and trajectory planning
- Applies to both translational and rotational motion of rigid bodies
Velocity vector definition
- Mathematically expressed as the time derivative of the position vector:
- Represents both speed (magnitude) and direction of motion
- Tangent to the path of motion at any given point
- Can be visualized as an arrow pointing in the direction of instantaneous motion
Velocity components
- In Cartesian coordinates:
- Cylindrical coordinates:
- Spherical coordinates:
- Each component represents motion along its respective coordinate direction
Relative velocity
- Describes motion of one object with respect to another moving object
- Calculated using vector addition:
- Essential for analyzing systems with multiple moving parts (gears, planetary motion)
- Applies to both linear and angular velocities in 3D space
Acceleration in 3D
- Represents the rate of change of velocity with respect to time in three dimensions
- Fundamental in analyzing forces and dynamic behavior of objects in motion
- Crucial for designing control systems and predicting motion in engineering applications
Acceleration vector definition
- Mathematically expressed as the second time derivative of position:
- Indicates both the magnitude and direction of velocity change
- Can be decomposed into components along different coordinate axes
- Plays a key role in Newton's Second Law of Motion in 3D
Acceleration components
- Cartesian coordinates:
- Cylindrical coordinates:
- Spherical coordinates: complex expressions involving r, θ, and φ components
- Each component represents the rate of change of the corresponding velocity component
Tangential vs normal acceleration
- Tangential acceleration: , changes the speed of the object
- Normal acceleration: , changes the direction of motion
- Total acceleration:
- Crucial for analyzing curvilinear motion and centripetal forces in 3D
Angular motion
- Describes rotational movement of objects around an axis in three-dimensional space
- Essential for analyzing rotating machinery, gyroscopes, and spacecraft attitude dynamics
- Complements linear motion analysis in Engineering Mechanics – Dynamics
Angular velocity vector
- Represents the rate of rotation around an axis:
- Magnitude gives the speed of rotation, direction aligns with the axis of rotation
- Related to linear velocity by for a rigid body
- Measured in radians per second (rad/s)
Angular acceleration vector
- Describes the rate of change of angular velocity:
- Composed of three components in 3D space:
- Causes changes in both magnitude and direction of angular velocity
- Relates to torque through moment of inertia in rotational dynamics
Rotation matrices
- 3x3 matrices that describe the orientation of a rigid body in 3D space
- Used to transform vectors between different coordinate frames
- Orthogonal matrices with determinant equal to 1 (or -1 for improper rotations)
- Can be composed to represent complex rotations (Euler angles, quaternions)
Equations of motion
- Fundamental mathematical descriptions of object behavior in 3D dynamic systems
- Form the basis for predicting and analyzing motion in various engineering applications
- Integrate concepts of forces, moments, and inertia with kinematic variables
Newton's second law in 3D
- Relates force to mass and acceleration:
- Applies to each coordinate direction independently in Cartesian coordinates
- Accounts for all external forces acting on the object
- Forms the basis for solving many dynamics problems in 3D space
Euler's equations
- Describe rotational motion of rigid bodies in 3D:
- Account for moments of inertia and applied torques
- Set of three coupled differential equations for 3D rotation
- Essential for analyzing complex rotational dynamics (gyroscopes, satellites)
Momentum equations
- Linear momentum: , relates to force through
- Angular momentum: , relates to torque via
- Conservation laws apply in absence of external forces/torques
- Useful for analyzing collisions and systems with varying mass or inertia
Kinematics of rigid bodies
- Studies the motion of rigid bodies without considering the forces causing the motion
- Fundamental to understanding complex mechanical systems and robotics
- Combines translational and rotational motion analysis in 3D space
Translation vs rotation
- Translation involves all particles of a body moving along parallel paths
- Rotation occurs around an axis, with particles moving in circular paths
- General motion combines both translation and rotation
- Described using position vectors, velocities, and accelerations for both types
Instantaneous axis of rotation
- Axis about which a body appears to rotate at a given instant
- Changes continuously for general 3D motion
- Velocity of any point given by
- Useful for analyzing complex motions in mechanisms and robotics
Rolling motion
- Combines translation of the center of mass with rotation about an axis
- No slip condition: for pure rolling
- Involves both linear and angular velocities and accelerations
- Applications in wheel dynamics, ball bearings, and planetary gears
Energy methods
- Provide alternative approaches to solving dynamics problems using energy principles
- Often simplify complex force analyses in 3D systems
- Based on the concept of work and energy conservation
Kinetic energy in 3D
- Translational kinetic energy:
- Rotational kinetic energy:
- Total kinetic energy for a rigid body:
- Depends on mass, moment of inertia, linear and angular velocities

Potential energy
- Gravitational potential energy: in uniform gravity field
- Elastic potential energy: for linear springs
- More complex forms for non-uniform fields or nonlinear elasticity
- Crucial for analyzing conservative force systems in 3D
Work-energy principle
- States that the work done on a system equals its change in kinetic energy
- Mathematically expressed as
- Applies to both linear and rotational motion in 3D
- Useful for solving problems where forces or torques vary with position
Impulse and momentum
- Deals with the effects of forces and torques applied over short time intervals
- Particularly useful for analyzing collisions and impact problems in 3D
- Based on the principles of conservation of linear and angular momentum
Linear momentum in 3D
- Defined as the product of mass and velocity:
- Vector quantity with components in x, y, and z directions
- Conserved in absence of external forces
- Change in momentum related to impulse:
Angular momentum
- Rotational analog of linear momentum:
- Depends on moment of inertia and angular velocity
- Conserved when no external torques are present
- Change in angular momentum related to angular impulse:
Impulse-momentum theorem
- States that impulse equals change in momentum:
- Applies to both linear and angular motion in 3D
- Useful for analyzing rapid force applications (impacts, explosions)
- Can simplify analysis of complex force interactions over short time periods
Numerical methods
- Provide computational techniques for solving complex 3D dynamics problems
- Essential when analytical solutions are difficult or impossible to obtain
- Enable simulation and prediction of system behavior in engineering applications
Numerical integration techniques
- Euler method: simple first-order method,
- Runge-Kutta methods: higher-order accuracy, popular 4th order RK4
- Predictor-corrector methods: combine explicit and implicit steps
- Adaptive step size algorithms for improved efficiency and accuracy
Error analysis
- Truncation error: arises from approximating continuous functions
- Round-off error: due to finite precision of computer arithmetic
- Stability analysis: ensures errors do not grow unbounded over time
- Convergence studies: verify solution approaches the true value as step size decreases
Software tools for 3D motion
- MATLAB: powerful numerical computing environment with built-in ODE solvers
- Python with SciPy: open-source alternative with similar capabilities
- Specialized multibody dynamics software (Adams, RecurDyn)
- Finite element analysis packages for complex geometries and interactions
Applications
- Demonstrate the practical relevance of 3D dynamics principles in various engineering fields
- Showcase the interdisciplinary nature of dynamics in solving real-world problems
- Highlight the importance of understanding complex motion in modern technology
Spacecraft dynamics
- Attitude determination and control for satellites and space probes
- Orbital mechanics and trajectory planning for space missions
- Modeling of complex systems like space stations or multi-stage rockets
- Simulation of rendezvous and docking procedures in orbit
Robotics and manipulators
- Kinematic and dynamic analysis of robotic arms and legs
- Path planning and obstacle avoidance in 3D environments
- Control system design for precise positioning and force application
- Modeling of humanoid robots and their balance and locomotion
Sports biomechanics
- Analysis of athlete movements in 3D space (golf swings, diving, gymnastics)
- Optimization of equipment design (aerodynamics of balls, rackets, skis)
- Injury prevention through understanding of joint forces and impacts
- Performance enhancement by studying efficient motion techniques