Time-based control is crucial in embedded systems, allowing precise timing and scheduling of tasks. This section explores techniques like Pulse Width Modulation (PWM) for power control and frequency generation for signal creation, essential for applications like motor control and LED dimming.
We'll also dive into periodic task scheduling, time measurement, and delay implementation. These concepts are vital for creating responsive and efficient embedded systems that can handle multiple tasks and accurately track time intervals.
Pulse Width Modulation and Frequency Control
Generating Pulse Width Modulation (PWM) Signals
- Pulse Width Modulation (PWM) is a technique used to control the average power delivered to a load by rapidly switching a power source on and off
- PWM signals are generated by varying the pulse width (on-time) while maintaining a constant frequency
- The average voltage delivered to the load is proportional to the duty cycle, which is the ratio of the pulse width to the total period
- PWM is commonly used in applications such as motor speed control, LED dimming, and power regulation
Controlling Frequency and Duty Cycle
- Frequency generation involves producing a periodic signal with a specific frequency using timers or counters
- The frequency of the generated signal is determined by the timer's clock source and the value loaded into the timer's register
- Duty cycle control refers to adjusting the percentage of time a signal is in the active state (high or low) within one period
- The duty cycle can be modified by changing the pulse width while keeping the frequency constant
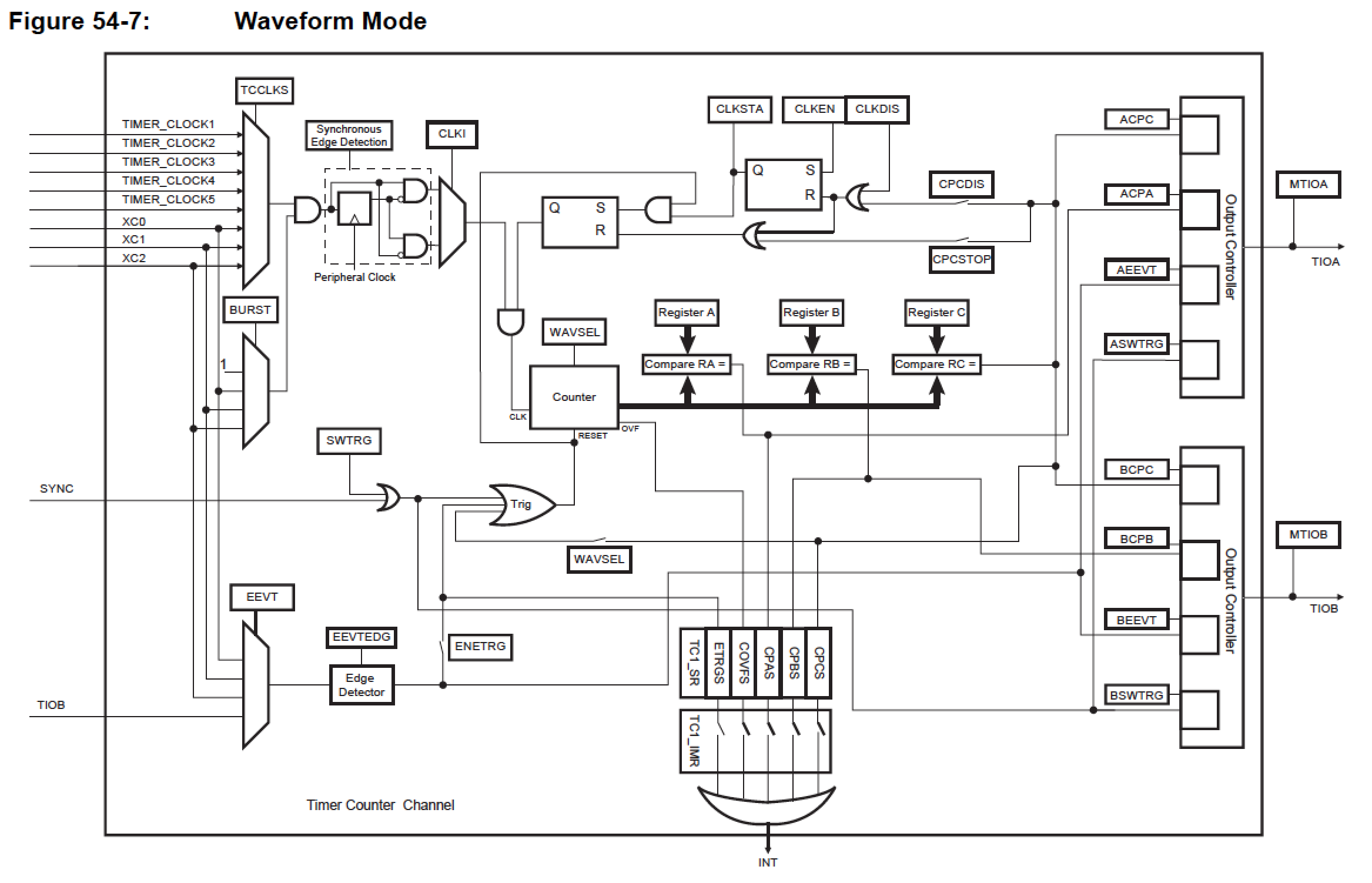
- Timers with output compare functionality can be used to generate PWM signals with precise frequency and duty cycle control
Timing and Scheduling
Implementing Periodic Task Scheduling
- Periodic task scheduling involves executing tasks or functions at regular intervals using timers or real-time operating systems (RTOS)
- Timers can be configured to generate interrupts at specific intervals, allowing the execution of periodic tasks
- The interrupt service routine (ISR) associated with the timer interrupt is used to trigger the execution of the periodic task
- Scheduling multiple periodic tasks requires careful consideration of task priorities and execution times to ensure deterministic behavior
Measuring Time and Implementing Delays
- Time measurement involves using timers to determine the elapsed time between events or to measure the duration of specific operations
- Timers can be configured to count clock cycles or external events, allowing accurate time measurement
- Delay implementation refers to introducing precise time delays in the execution of code
- Delays can be achieved by configuring timers to generate interrupts after a specific time period and waiting for the interrupt to occur
- Busy-waiting loops can also be used for short delays, but they consume CPU cycles and may not be suitable for longer delays
Signal Conditioning
Debouncing Techniques for Digital Inputs
- Debouncing is the process of removing the unwanted transitions (bounces) that occur when mechanical switches or buttons are pressed or released
- Mechanical switches can generate multiple rapid transitions due to the physical contacts bouncing against each other
- Debouncing techniques are used to filter out these spurious transitions and ensure a clean and stable digital input signal
- Software debouncing involves sampling the input signal at regular intervals and applying a debounce delay to determine the stable state of the switch
- Hardware debouncing uses RC filters or dedicated debounce ICs to smooth out the bouncing transitions before the signal reaches the microcontroller