Branch and bound is a powerful technique for solving complex discrete optimization problems. It systematically explores the solution space, using intelligent strategies to discard fruitless candidates and drastically reduce the search area.
Key concepts include branching to create subproblems, bounding to estimate optimal solutions, and pruning to eliminate unpromising branches. The method represents the problem space as a tree, employing various strategies to efficiently navigate and solve optimization challenges.
Fundamentals of branch and bound
- Branch and bound forms a crucial component in combinatorial optimization used to solve complex discrete optimization problems
- Systematically enumerates candidate solutions by forming a rooted tree of the solution space
- Employs intelligent strategies to discard large subsets of fruitless candidates, drastically reducing the number of candidates to be explored
Key concepts and terminology
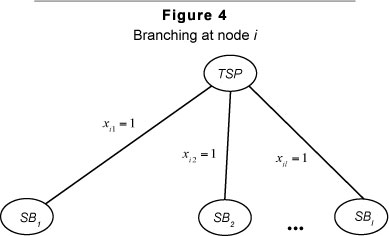
- Branching divides the problem into smaller subproblems, creating a tree-like structure
- Bounding calculates lower and upper bounds for the optimal solution within each subproblem
- Fathoming occurs when a subproblem can be discarded without further exploration
- Incumbent solution represents the best feasible solution found so far
- Pruning eliminates branches of the search tree that cannot lead to optimal solutions
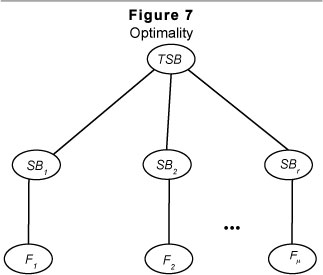
Problem space representation
- Utilizes a tree structure to represent the solution space of the optimization problem
- Root node corresponds to the original problem with all possible solutions
- Child nodes represent subproblems created by branching decisions
- Leaf nodes contain potential solutions or infeasible subproblems
- Path from root to leaf node defines a specific solution or partial solution
Bounding functions
- Estimate the best possible solution achievable from a given node
- Lower bounds indicate the minimum possible objective value for minimization problems
- Upper bounds represent the maximum possible objective value for maximization problems
- Tight bounds lead to more effective pruning and faster convergence
- Relaxation techniques often employed to compute bounds efficiently
Branching strategies
- Branching strategies significantly impact the efficiency of branch and bound algorithms in combinatorial optimization
- Proper selection of branching variables and values can lead to faster convergence and reduced search space
- Different branching strategies suit various problem types and structures
Depth-first vs breadth-first
- Depth-first search explores one branch of the tree to its full depth before backtracking
- Requires less memory as it stores only the current path
- May find feasible solutions quickly but can get stuck in suboptimal branches
- Breadth-first search explores all nodes at the current level before moving to the next level
- Guarantees finding the optimal solution in the shortest number of branches
- Requires more memory to store all nodes at each level
- Hybrid approaches combine elements of both strategies to balance memory usage and solution quality
Best-first search
- Selects the most promising node for exploration based on a heuristic evaluation
- Typically uses a priority queue to maintain nodes ordered by their bound values
- Tends to find good solutions quickly and can lead to earlier pruning of suboptimal branches
- May require significant memory to store all unexplored nodes
- Variations include beam search, which limits the number of nodes kept in memory
Hybrid approaches
- Combine multiple branching strategies to leverage their respective strengths
- Depth-first with periodic best-first phases balances memory usage and solution quality
- Iterative deepening performs repeated depth-first searches with increasing depth limits
- Contour search explores nodes within a specified range of the best known bound
- Adaptive strategies dynamically switch between different approaches based on problem characteristics and search progress
Bounding techniques
- Bounding techniques form the core of branch and bound algorithms in combinatorial optimization
- Effective bounds lead to more efficient pruning and faster convergence to optimal solutions
- Different bounding methods suit various problem types and structures
Lower and upper bounds
- Lower bounds estimate the minimum possible objective value for minimization problems
- Upper bounds estimate the maximum possible objective value for maximization problems
- Tighter bounds lead to more effective pruning of the search tree
- Bounds can be problem-specific or general (linear programming relaxation)
- Dual bounds derived from Lagrangian relaxation often provide strong lower bounds
Relaxation methods
- Linear programming relaxation replaces integer constraints with continuous variables
- Lagrangian relaxation moves difficult constraints to the objective function with penalty terms
- Surrogate relaxation combines multiple constraints into a single constraint
- Semidefinite programming relaxation lifts the problem to a higher-dimensional space
- Column generation dynamically generates variables to solve large-scale relaxations
Pruning strategies
- Bounding pruning discards nodes with bounds worse than the incumbent solution
- Infeasibility pruning eliminates nodes that violate problem constraints
- Optimality pruning occurs when a node's bound matches the incumbent solution value
- Dominance pruning removes nodes that are provably worse than other explored nodes
- Symmetry pruning eliminates redundant branches due to problem symmetries
Implementation considerations
- Implementation details significantly impact the performance of branch and bound algorithms in combinatorial optimization
- Efficient data structures and memory management are crucial for handling large-scale problems
- Parallelization can greatly enhance the algorithm's speed and scalability
Data structures for efficiency
- Priority queues (heaps) maintain the list of active nodes for best-first search
- Balanced binary trees (AVL, Red-Black) efficiently store and retrieve problem data
- Hash tables provide fast lookup for memoization and cut generation
- Bit vectors compress representation of sets and solutions for memory efficiency
- Sparse matrices optimize storage and operations for large, sparse problem instances
Memory management
- Node pooling reuses memory allocated for explored nodes to reduce allocation overhead
- Depth-first search with iterative deepening controls memory usage in large problems
- Disk-based storage offloads less frequently accessed data to external memory
- Incremental state updates minimize memory required to represent nodes
- Garbage collection strategies periodically free memory from pruned branches
Parallelization opportunities
- Tree parallelism explores different branches of the search tree concurrently
- Node parallelism divides the work of bounding and branching within a single node
- Speculative parallelism explores multiple promising nodes simultaneously
- Load balancing techniques (work stealing) distribute work evenly among processors
- Parallel bound computation accelerates the evaluation of complex bounding functions
Applications in optimization
- Branch and bound algorithms find extensive use in various combinatorial optimization problems
- These methods provide exact solutions for problems that are otherwise intractable
- Adaptations of branch and bound suit different problem structures and characteristics
Integer programming
- Solves linear programming problems with integer constraints on variables
- Branch on fractional variables in the LP relaxation solution
- Cutting plane methods generate additional constraints to tighten the relaxation
- Applications include production planning, resource allocation, and network design
- Commercial solvers (CPLEX, Gurobi) use sophisticated branch and bound implementations
Traveling salesman problem
- Finds the shortest tour visiting all cities exactly once and returning to the start
- Lower bounds computed using minimum spanning tree or assignment relaxations
- Branching decisions typically involve including or excluding specific edges
- Symmetry breaking techniques reduce the search space by eliminating equivalent tours
- Large instances solved using advanced techniques like branch-and-cut with subtour elimination constraints
Knapsack problem
- Selects items to maximize total value while respecting a weight constraint
- Bounds computed using fractional knapsack relaxation or dynamic programming
- Branching typically decides whether to include or exclude specific items
- Dominance relations and core concept help reduce the problem size
- Variants include multiple knapsack, multidimensional knapsack, and quadratic knapsack problems
Advanced branch and bound
- Advanced techniques in branch and bound enhance the algorithm's performance for complex optimization problems
- These methods often combine branch and bound with other optimization approaches
- Tailored strategies exploit problem-specific structures and properties
Branch and cut
- Integrates cutting plane methods within the branch and bound framework
- Generates valid inequalities to tighten the linear programming relaxation
- Cuts (Gomory, lift-and-project, clique) strengthen bounds and reduce tree size
- Cut management strategies balance the benefits of cuts against their computational cost
- Particularly effective for problems with complex polyhedral structure (vehicle routing, network design)
Branch and price
- Combines branch and bound with column generation for large-scale problems
- Pricing subproblem generates new columns (variables) to improve the master problem
- Branching decisions must be compatible with the column generation process
- Stabilization techniques improve convergence of the column generation
- Applications include crew scheduling, cutting stock, and vehicle routing problems
Branch and infer
- Incorporates constraint propagation techniques from constraint programming
- Inference rules deduce additional constraints or variable fixings at each node
- Domain filtering reduces the search space by eliminating infeasible values
- Nogood learning identifies combinations of decisions that lead to infeasibility
- Particularly effective for highly constrained combinatorial problems (scheduling, timetabling)
Performance analysis
- Performance analysis of branch and bound algorithms is crucial for understanding their behavior and improving efficiency
- Both theoretical and empirical evaluations provide insights into algorithm effectiveness
- Analysis guides the development of more efficient branching and bounding strategies
Time complexity considerations
- Worst-case time complexity often exponential due to the combinatorial nature of problems
- Average-case analysis challenging due to problem-dependent branching and bounding
- Parameterized complexity analysis considers problem-specific parameters
- Phase transitions in problem difficulty affect algorithm performance
- Pruning effectiveness significantly impacts actual running time
Space complexity issues
- Space complexity depends on the branching strategy and problem structure
- Depth-first search requires linear space in the depth of the search tree
- Best-first search may require exponential space in the worst case
- Memory-constrained variants (iterative deepening, limited discrepancy search) trade time for space
- External memory algorithms handle problems too large for main memory
Empirical performance evaluation
- Benchmark problem sets (MIPLIB, TSPLIB) allow comparison of different algorithms
- Performance profiles visualize algorithm behavior across multiple problem instances
- Statistical analysis of running times identifies factors affecting performance
- Scaling studies examine how performance changes with problem size
- Sensitivity analysis assesses the impact of parameter choices on algorithm efficiency
Limitations and alternatives
- Branch and bound algorithms face limitations in solving large-scale or highly complex optimization problems
- Understanding these limitations helps in choosing appropriate solution methods
- Hybrid approaches often combine branch and bound with other techniques to overcome limitations
Worst-case scenarios
- Exponential time complexity in the worst case limits applicability to large instances
- Degenerate problems with weak bounds may explore the entire solution space
- Symmetry in the problem structure can lead to redundant exploration of equivalent solutions
- Highly constrained problems may have few feasible solutions, making pruning less effective
- Numerical instability in bound computations can lead to incorrect pruning decisions
Comparison with heuristics
- Heuristics often find good solutions quickly but without optimality guarantees
- Metaheuristics (genetic algorithms, simulated annealing) explore the solution space more broadly
- Local search methods (tabu search, variable neighborhood search) intensify the search in promising regions
- Approximation algorithms provide solutions with provable quality bounds
- Machine learning approaches can guide the search or learn problem-specific heuristics
Hybrid algorithms
- Matheuristics combine mathematical programming techniques with heuristics
- Large neighborhood search uses exact methods to explore restricted solution spaces
- Constraint programming hybrids leverage constraint propagation for tighter bounds
- Decomposition methods (Benders, Dantzig-Wolfe) break large problems into manageable subproblems
- Learning-based approaches use machine learning to guide branching and bounding decisions