Pole placement control is a powerful technique for shaping system dynamics. By strategically positioning closed-loop poles, engineers can achieve desired stability and performance characteristics. This method leverages state feedback to exert precise control over system behavior.
The approach involves selecting pole locations based on performance criteria like settling time and overshoot. By manipulating the characteristic equation through feedback gain selection, designers can craft systems with optimal response properties. Pole placement offers a direct link between mathematical modeling and real-world system behavior.
Pole Placement Control Strategy
Concept of pole placement
- Pole placement designs feedback control systems by selecting closed-loop pole locations
- System poles determine dynamics and stability as roots of characteristic equation
- Control objectives encompass stability, transient response, steady-state error
- State feedback control utilizes full state information enabling arbitrary pole placement
Pole locations and system response
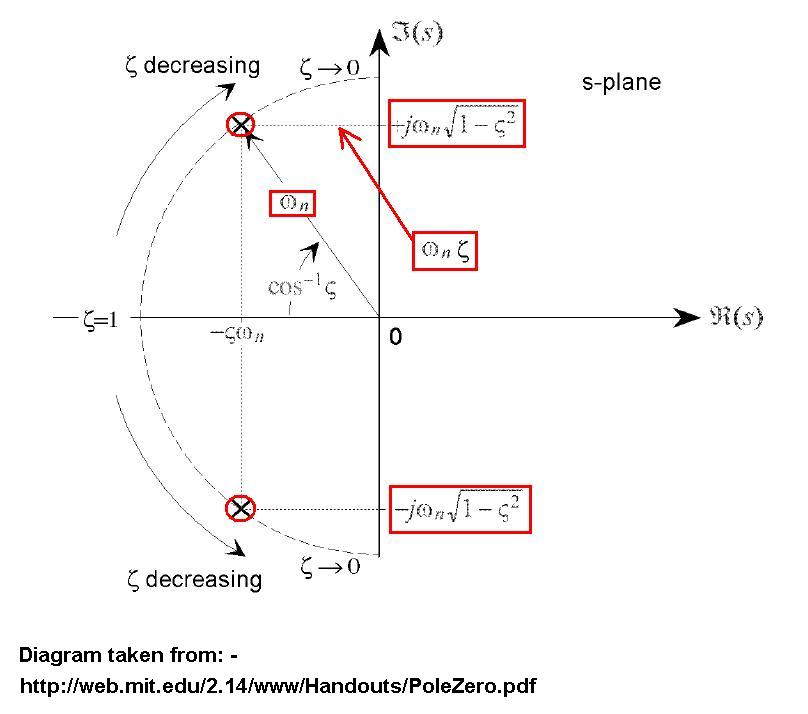
- Complex plane pole locations indicate system stability (left-half plane: stable, right-half plane: unstable, imaginary axis: marginally stable)
- Dominant poles nearest imaginary axis most influence system response
- Natural frequency affects response speed measured by distance of poles from origin
- Damping ratio determines oscillatory behavior based on angle of poles from negative real axis
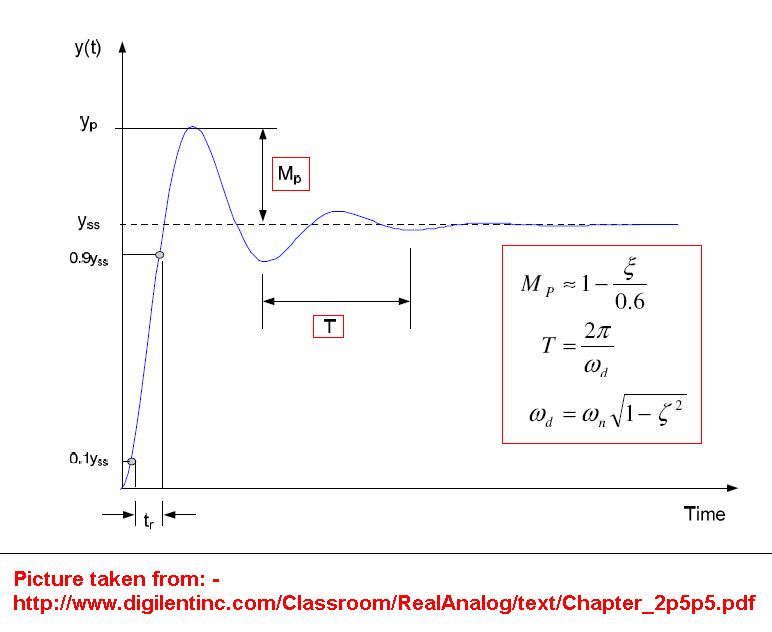
- Time-domain characteristics include settling time, rise time, overshoot, steady-state error
State feedback controller design
- State-space representation: ,
- State feedback control law:
- Closed-loop system:
- Characteristic equation:
- Ackermann's formula computes feedback gain matrix K
- Controllability necessary for pole placement, assessed via controllability matrix:
Pole selection for system performance
- Performance specifications include settling time, percent overshoot, rise time, steady-state error
- Second-order system approximation uses natural frequency () and damping ratio ()
- Pole placement strategies employ patterns (Butterworth, Bessel, ITAE optimal poles)
- Robustness considerations address sensitivity to parameter variations and disturbance rejection
- Tradeoffs balance fast response vs control effort, damping vs speed of response
- Simulation and iteration fine-tune pole locations and verify system performance