➗Abstract Linear Algebra II Unit 6 Review
6.4 Minimal and characteristic polynomials
6.4 Minimal and characteristic polynomials
Written by the Fiveable Content Team • Last updated August 2024
Written by the Fiveable Content Team • Last updated August 2024
➗Abstract Linear Algebra II
Unit & Topic Study Guides
Vector Spaces and Subspaces
Linear Transformations
Eigenvalues and Eigenvectors
Inner Product Spaces
Spectral Theory
Canonical Forms
Tensor Products in Multilinear Algebra
Advanced Linear Algebra Topics
Minimal and characteristic polynomials are key tools for understanding matrices. They reveal crucial info about eigenvalues, matrix structure, and behavior. These polynomials help simplify complex matrix operations and provide insights into a matrix's properties.
In this part of canonical forms, we explore how to calculate these polynomials and use them. We'll see how they relate to eigenvalues, matrix powers, and other important concepts in linear algebra.
Minimal and Characteristic Polynomials
Definitions and Properties
- Characteristic polynomial of matrix A defined as det(λI - A) where λ represents a variable and I denotes the identity matrix of equal size to A
- Minimal polynomial of matrix A represents the monic polynomial p(λ) with lowest degree satisfying p(A) = 0 (0 signifies the zero matrix)
- Both polynomials maintain uniqueness for a given matrix
- Roots of the characteristic polynomial correspond to the matrix eigenvalues
- Minimal polynomial divides the characteristic polynomial
- Degree of minimal polynomial remains less than or equal to matrix size
- Minimal polynomial encompasses all distinct linear factors of the characteristic polynomial
- Multiplicity of eigenvalue in minimal polynomial indicates its index
- Multiplicity of eigenvalue in characteristic polynomial represents its algebraic multiplicity
- Geometric multiplicity of eigenvalue relates to the degree of corresponding factor in minimal polynomial
Relationships and Comparisons
- Minimal and characteristic polynomials share identical irreducible factors over the base field
- Minimal polynomial contains each irreducible factor of characteristic polynomial at least once
- Factor degrees in minimal polynomial remain less than or equal to their degrees in characteristic polynomial
- Invariant factors of matrix form divisibility chain with last factor equaling minimal polynomial
- Product of all invariant factors yields characteristic polynomial
- For matrices with distinct eigenvalues, minimal polynomial becomes product of (λ - λi) where λi represents distinct eigenvalues
Computing Polynomials of Matrices

Calculation Methods
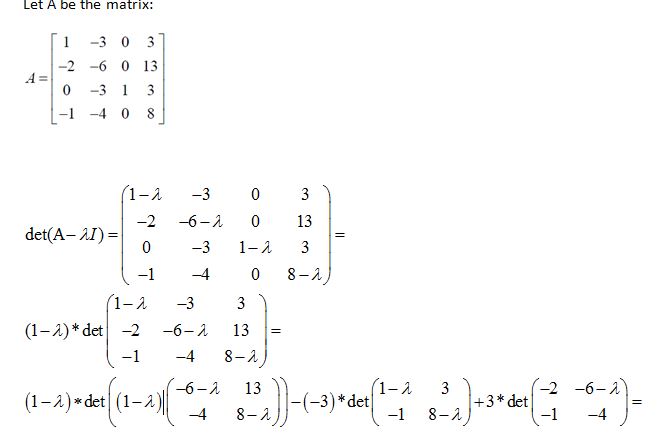
- Compute characteristic polynomial by expanding det(λI - A) using determinant properties and simplifying
- Determine minimal polynomial using Cayley-Hamilton theorem as starting point and reducing degree if possible
- Direct computation feasible for matrices up to 3x3 (4x4 matrices, 5x5 matrices)
- Utilize computational software for larger matrices (MATLAB, Mathematica)
- Apply rational canonical form of matrix to determine minimal polynomial
- Calculate characteristic polynomial for triangular matrices by multiplying diagonal entries minus λ
- Employ known formulas for special matrix structures (companion matrices, Jordan blocks)
Specific Matrix Types
- Companion matrices have characteristic polynomial equal to their defining polynomial
- Jordan blocks have characteristic polynomial (λ - λ0)^n where λ0 represents the eigenvalue and n denotes block size
- Diagonal matrices have characteristic polynomial equal to product of (λ - aii) where aii represents diagonal entries
- Nilpotent matrices of index k have minimal polynomial λ^k and characteristic polynomial λ^n (n represents matrix size)
- Projection matrices (P^2 = P) have minimal polynomial λ(λ - 1) or λ - 1 or λ depending on rank
Polynomials and Matrix Properties
Eigenvalue Relationships
- Characteristic polynomial roots correspond to matrix eigenvalues
- Minimal polynomial contains all distinct linear factors of characteristic polynomial
- Multiplicity of eigenvalue in minimal polynomial indicates index (smallest k for (A - λI)^k = 0)
- Multiplicity of eigenvalue in characteristic polynomial represents algebraic multiplicity
- Geometric multiplicity of eigenvalue relates to nullity of A - λI
- Matrices with distinct eigenvalues have minimal polynomial equal to product of (λ - λi) factors
Invariant Factor Connections
- Invariant factors form divisibility chain (f1 | f2 | ... | fk)
- Last invariant factor equals minimal polynomial
- Product of all invariant factors yields characteristic polynomial
- Number of invariant factors corresponds to rank of matrix
- Invariant factors determine similarity class of matrix
- Elementary divisors derived from invariant factors determine Jordan canonical form
Cayley-Hamilton Theorem Application
Power Reduction
- Cayley-Hamilton theorem states every square matrix satisfies its characteristic polynomial
- Express matrix powers A^n (n ≥ matrix size) as linear combination of lower powers
- Reduce high powers using characteristic polynomial to combination of powers less than matrix size
- Determine coefficients in linear combination by solving system of linear equations
- Simplify calculations involving high matrix powers (A^100, A^1000)
- Utilize minimal polynomial for more efficient power computations
- Apply theorem to compute periodic behavior of matrix powers
Matrix Computations
- Calculate matrix inverse using adjugate matrix and characteristic polynomial
- Determine matrix exponential e^A using power series and Cayley-Hamilton reduction
- Compute matrix functions f(A) by expressing as polynomial in A
- Solve matrix equations of form p(A) = B where p represents a polynomial
- Find roots of matrix polynomials using Cayley-Hamilton theorem
- Prove matrix identities and relations using polynomial reductions